二日目の午後にはプレゼンの時間をいただいて、こんな感じの内容を話してきた。前半は仕事と制作&イベントの両立、後半は「なんで作るのか?」という話を。 よく、「何で作ったのか?」「作っているのか?」というコトを聞かれたとき、自分は「楽しいから(Just a fun)」と答えている。ただ、よくよく考えると、作るという行為は考えるところから始まって、実際に作っている過程・そして完成(するかどうかは別)までの一連の流れに他ならない。この全体・または一部分でも好き・楽しいなら、それが「Just a fun」でもある。 そして、ついこの間もイベントで口走ってしまったけど、p.21 の「体験は言葉や理由を超越する」というのは、国内に限らず海外でも展示する時の一助にもなるはず。
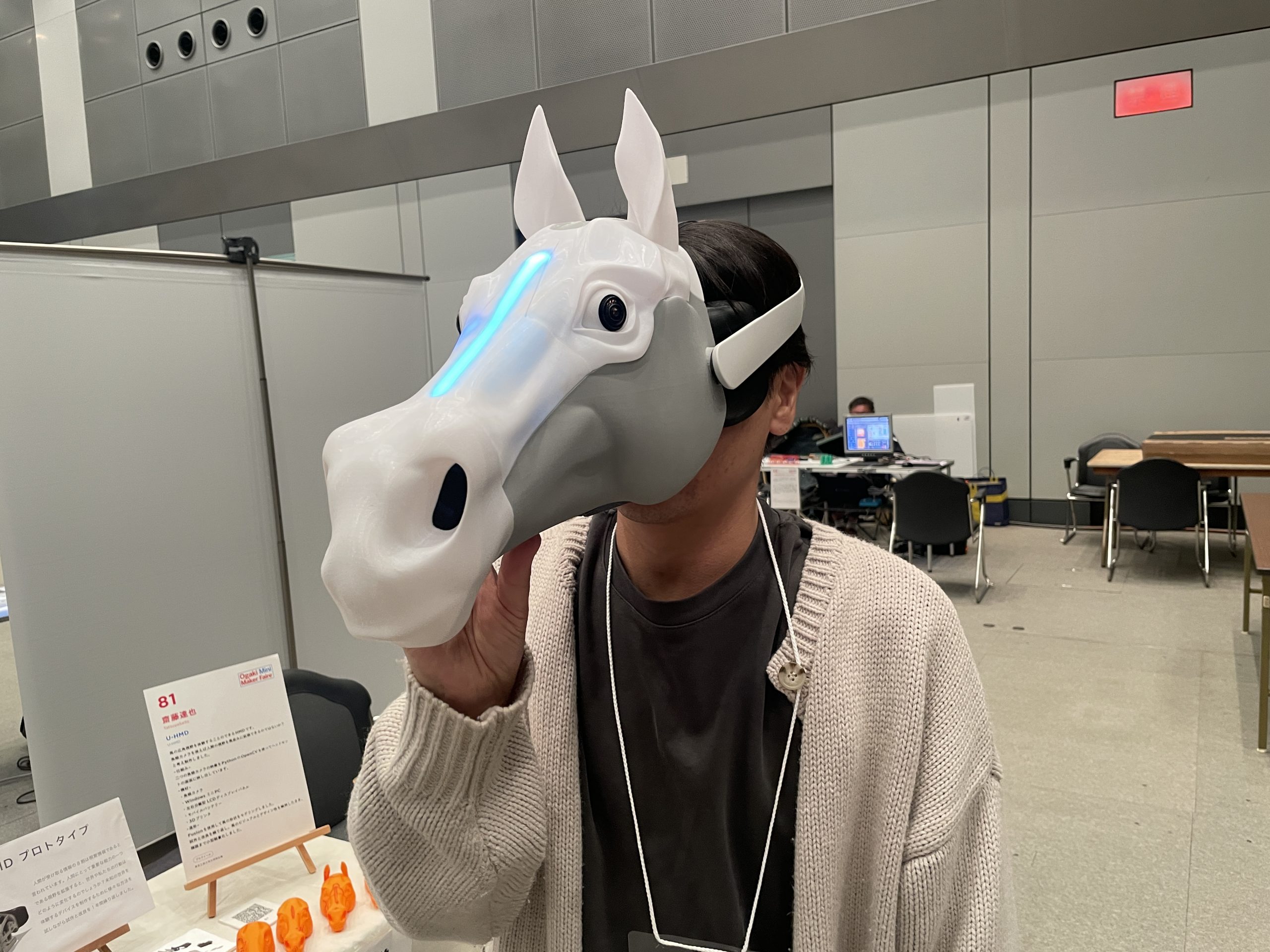
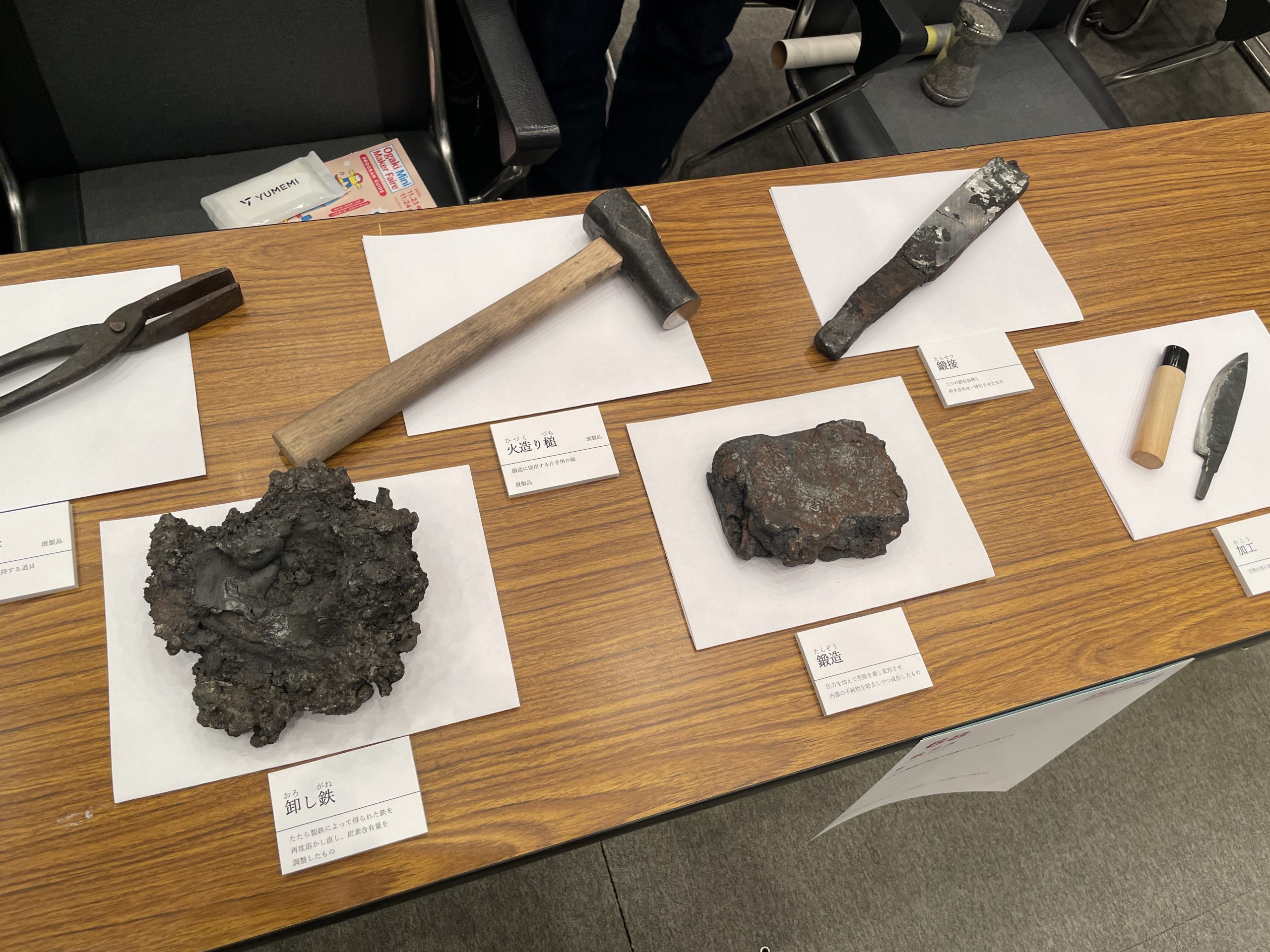
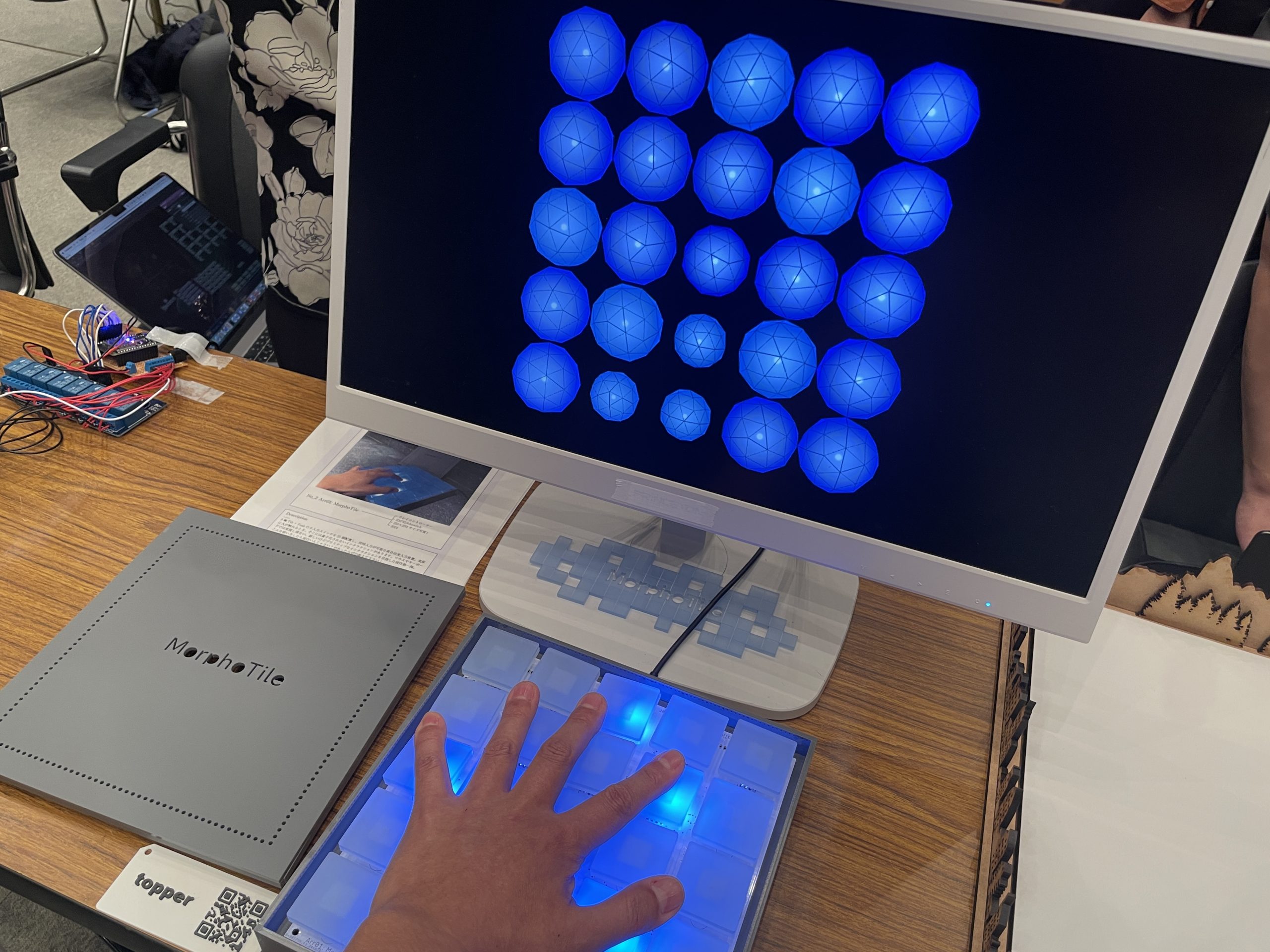
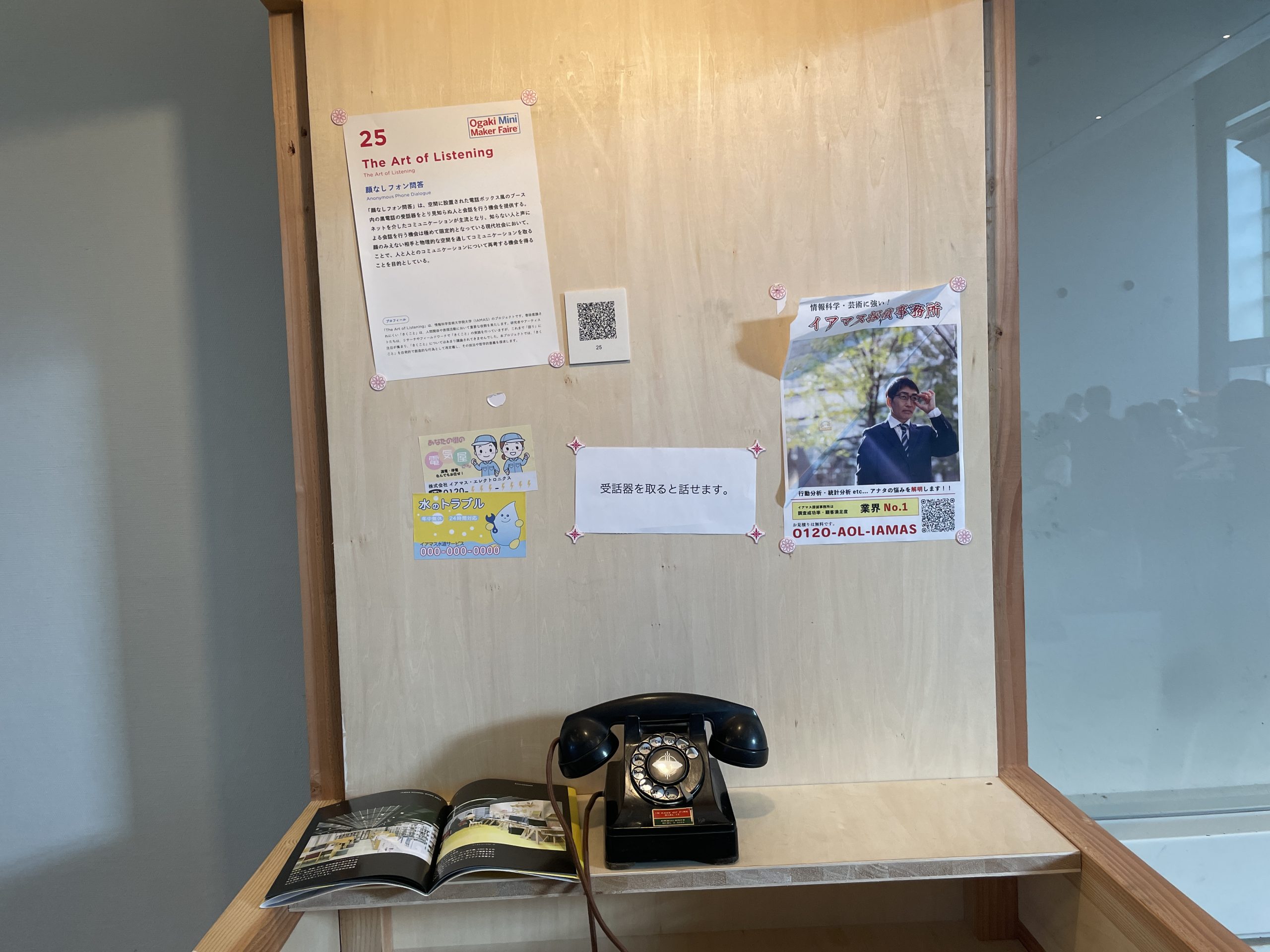
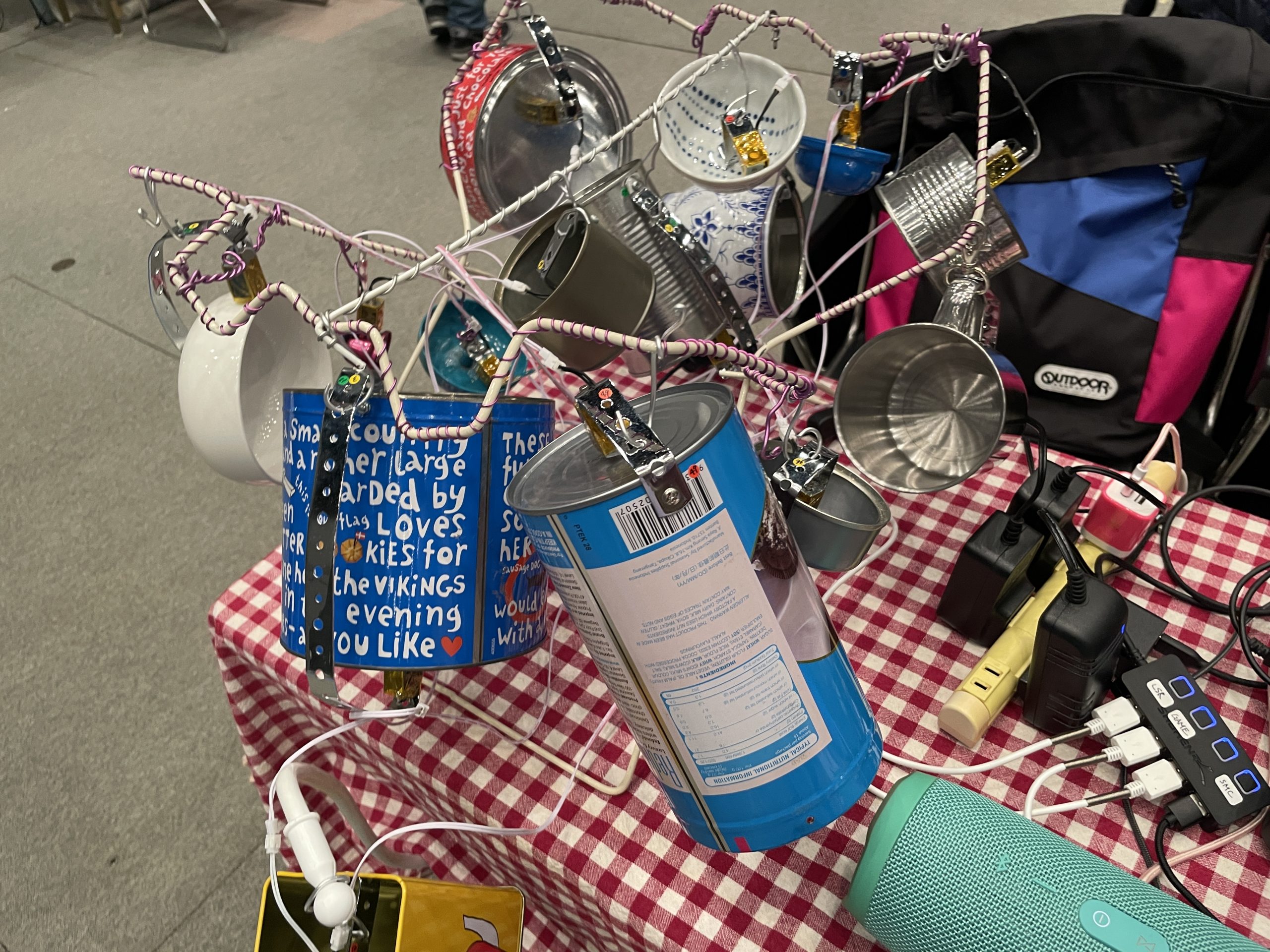
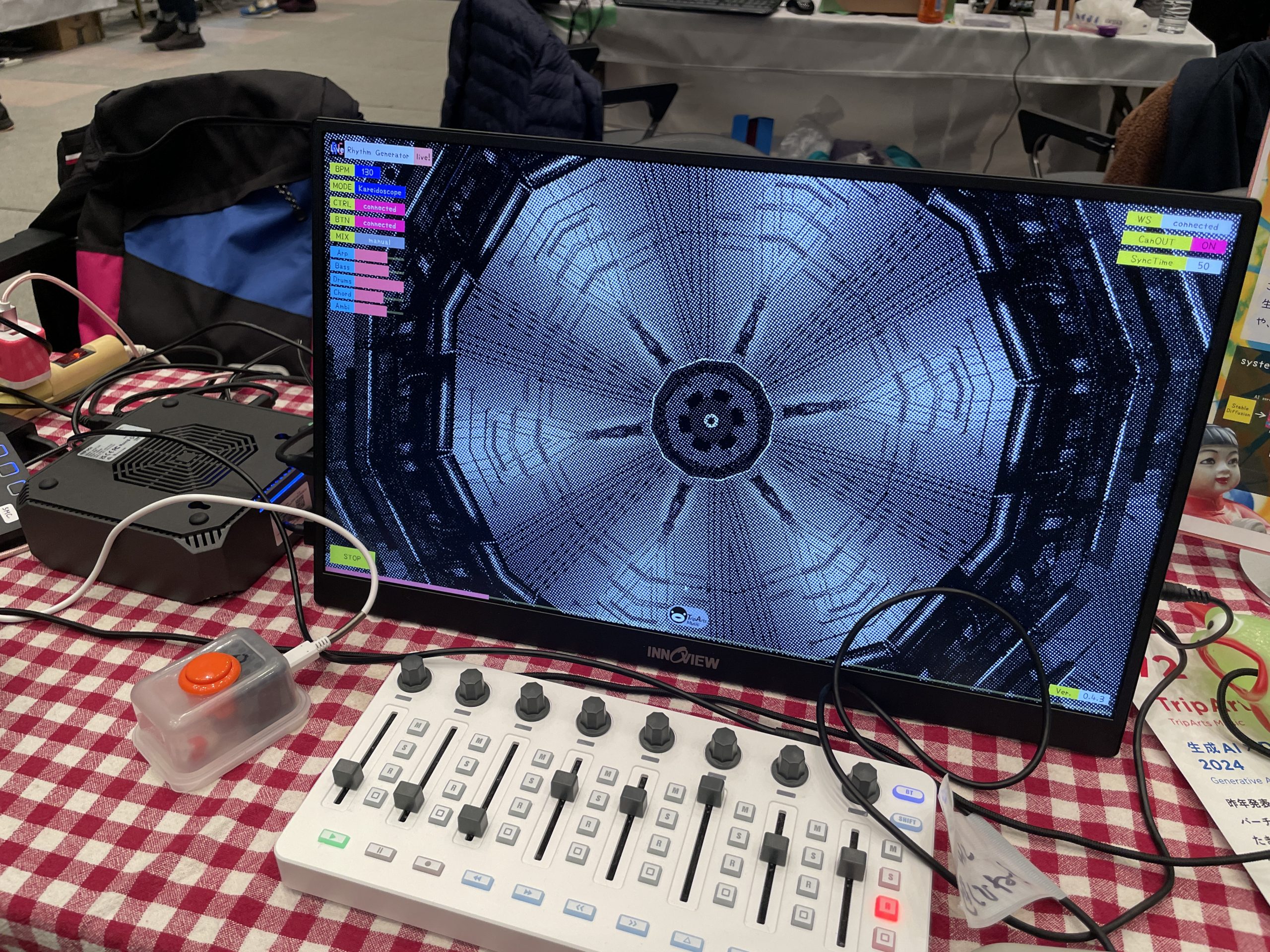
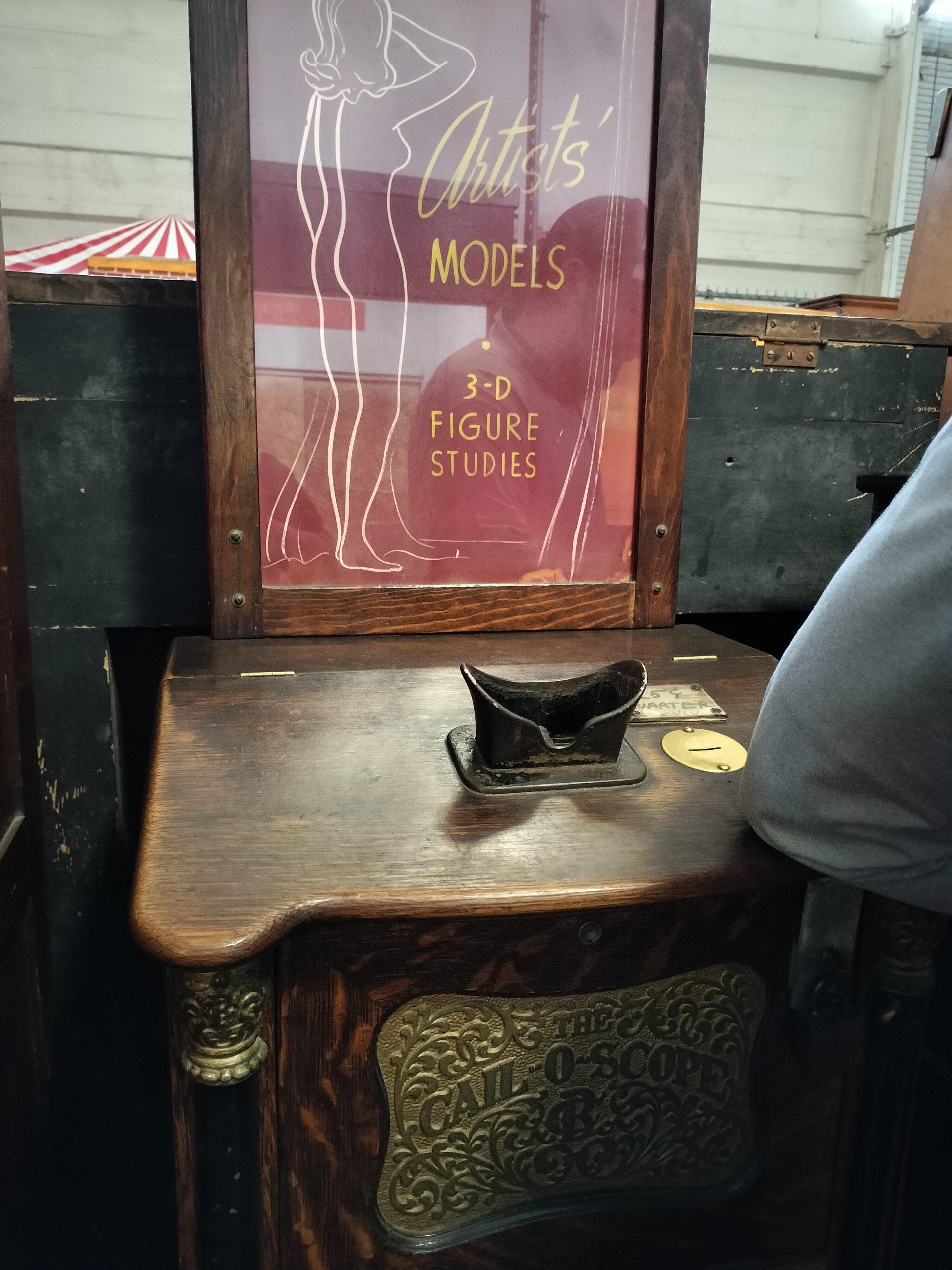
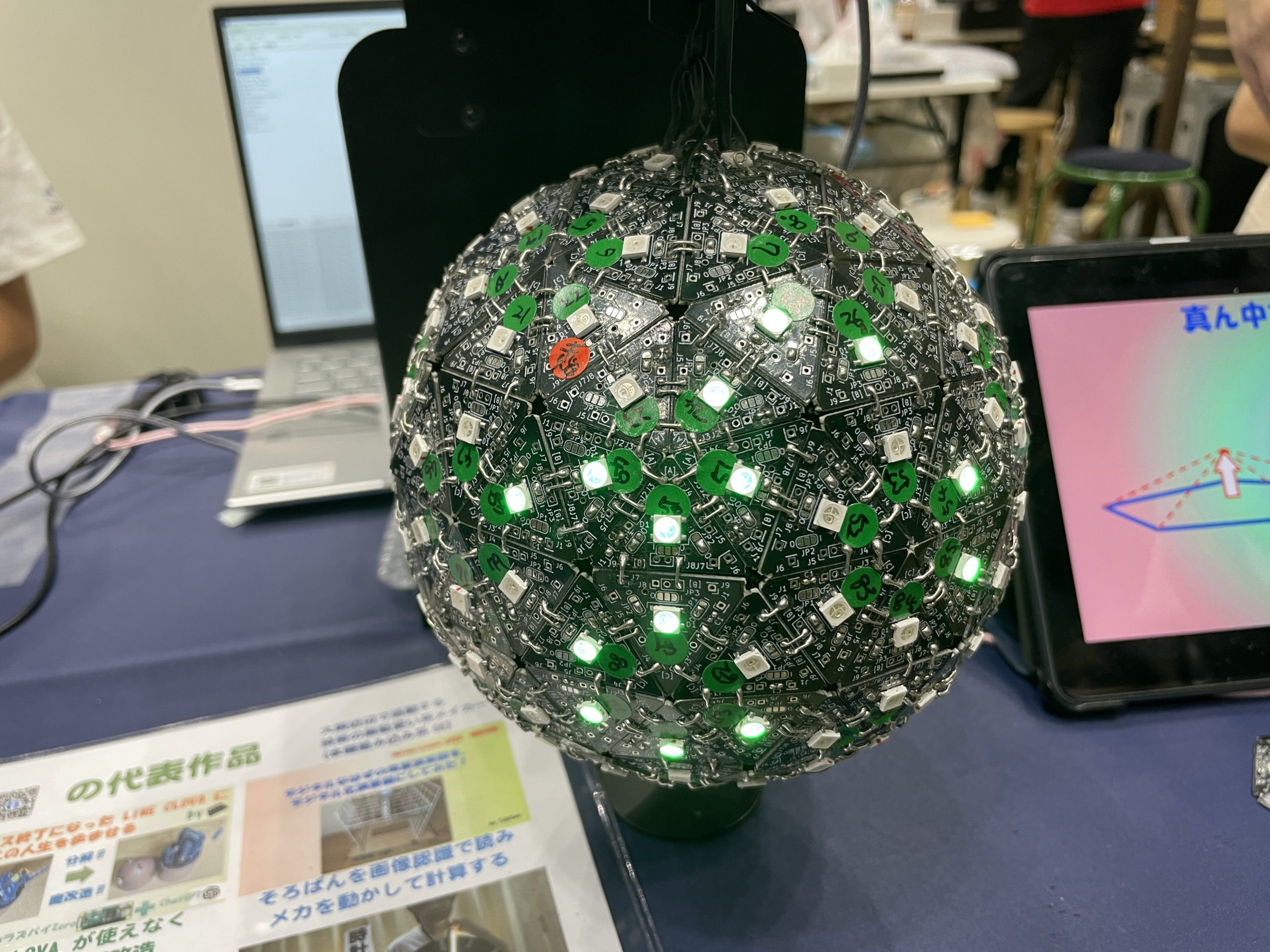
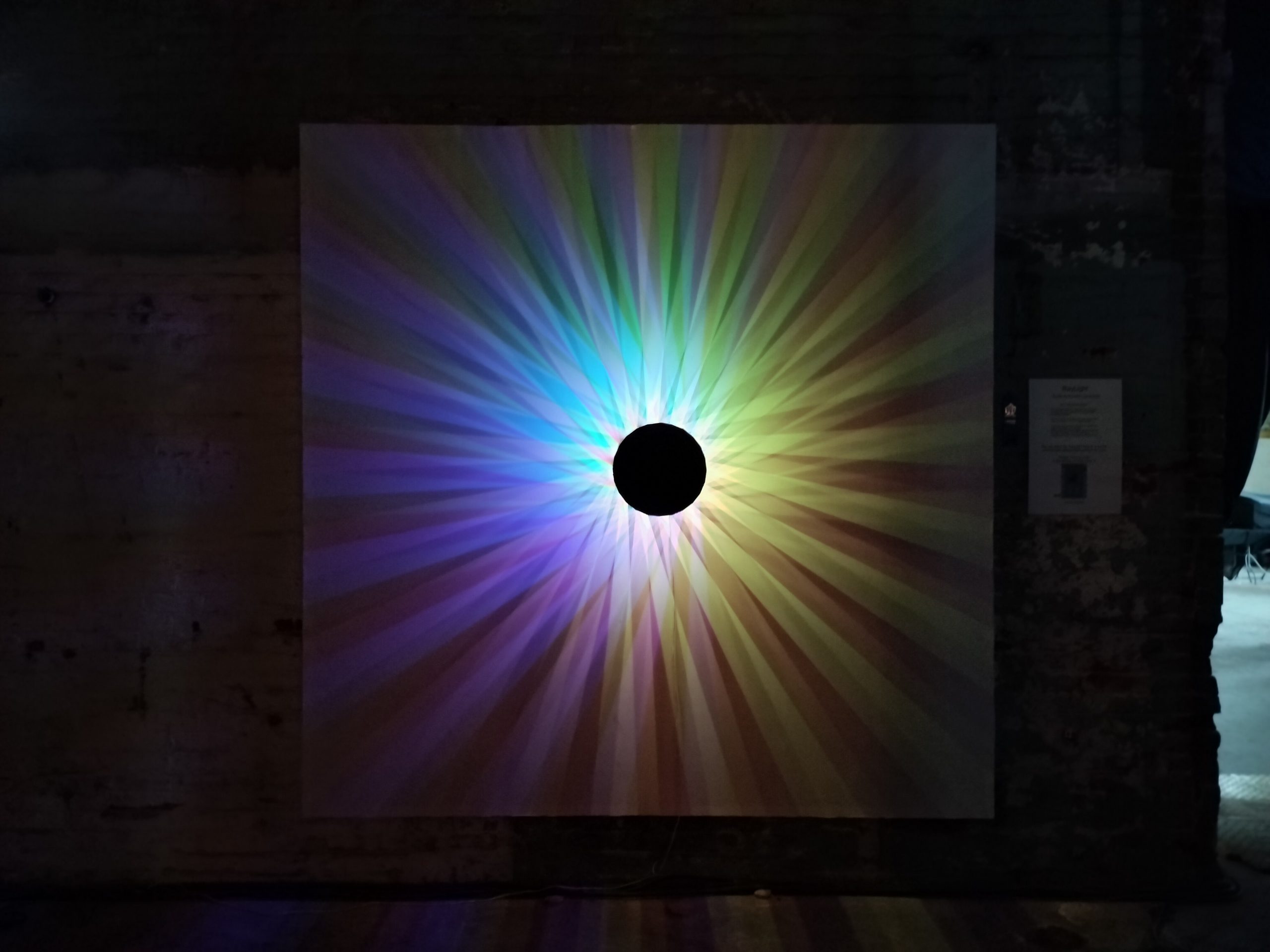
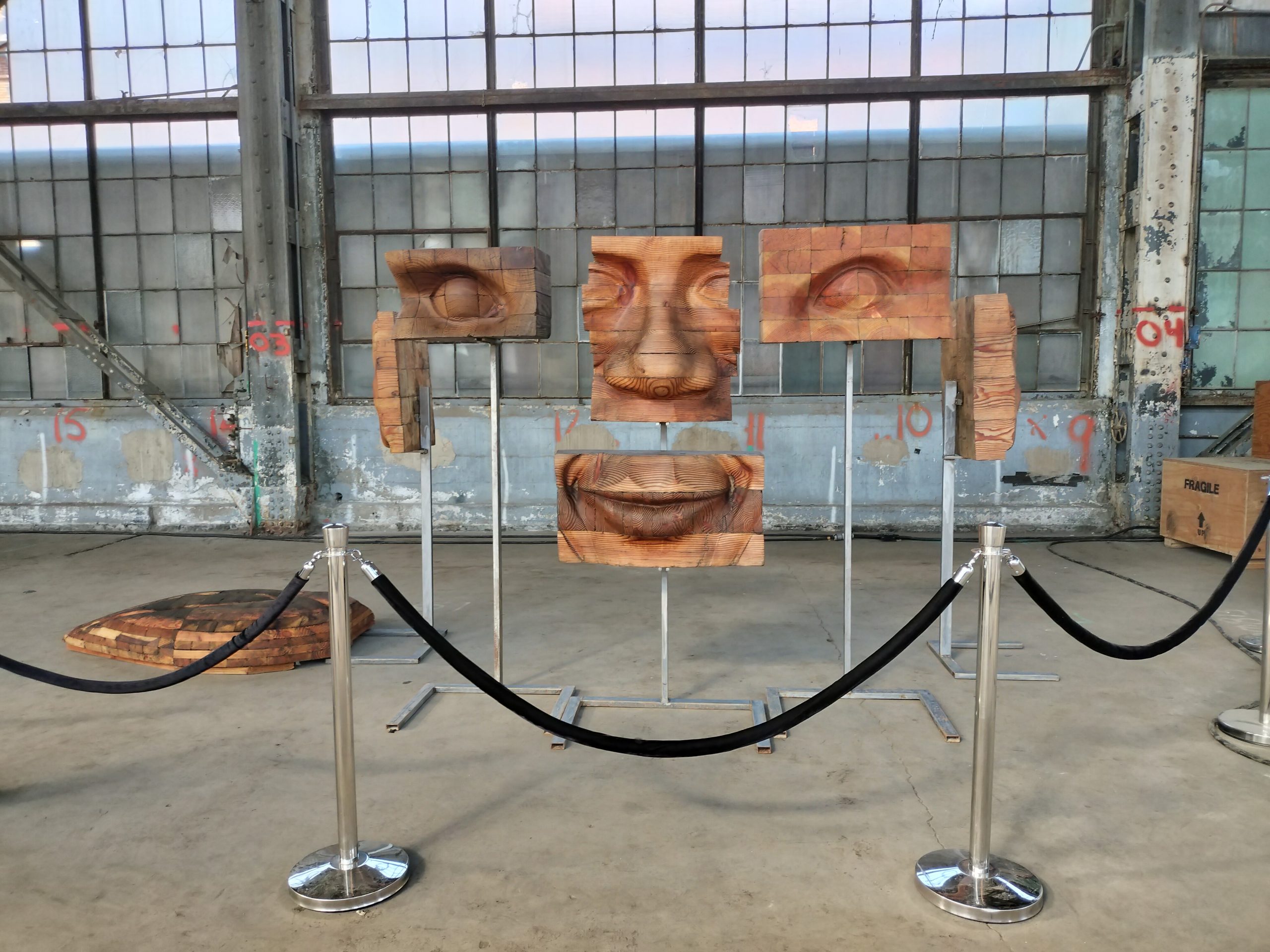
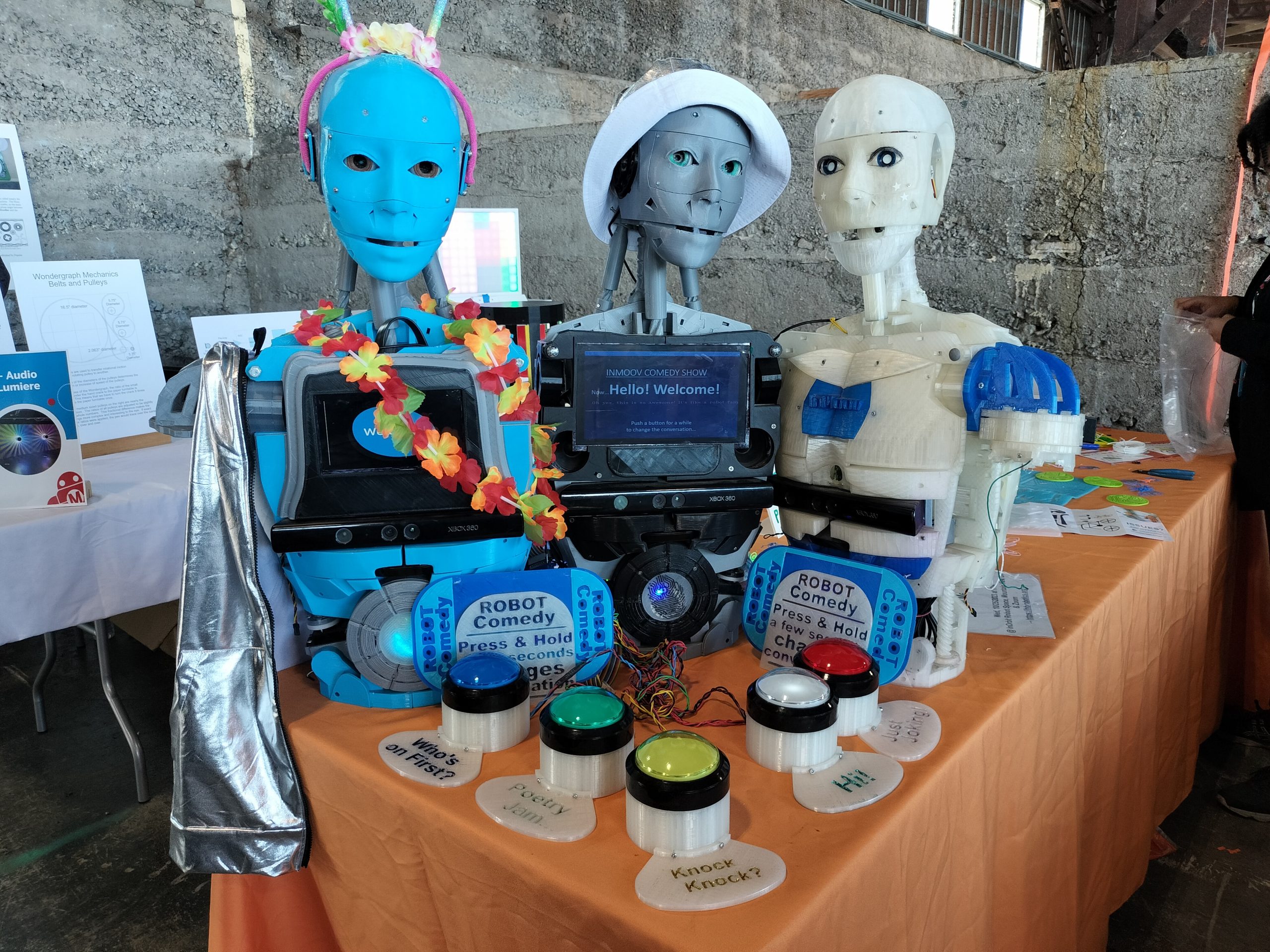
馬の視野を得られる。見た目のインパクトが半端ない。鉄。鉄が置いてある。。。昔、Maker Faire Bay Areaでレンガだけ並べている展示があったけど、それに通じるような。Feという素材が単体として、砂鉄から収集する方法から鉄にするまで。普通にびっくりした。ボタンLEDだと思ったら、上下左右に押せるボタンで画面上の球と連動して動作していた。方向・ベクトルをもったボタンという発想が面白かった。なんだろこれ?と思って受話器と取ったら向こうから声が。会話を進めて、もしかしてOpenAI/Whisper/GPT?と疑って話してしまう自 分がいて、「AIなんですか?」と聞いてしまっていた。そういう時代なんだなーと自分自身が考えさせられた。
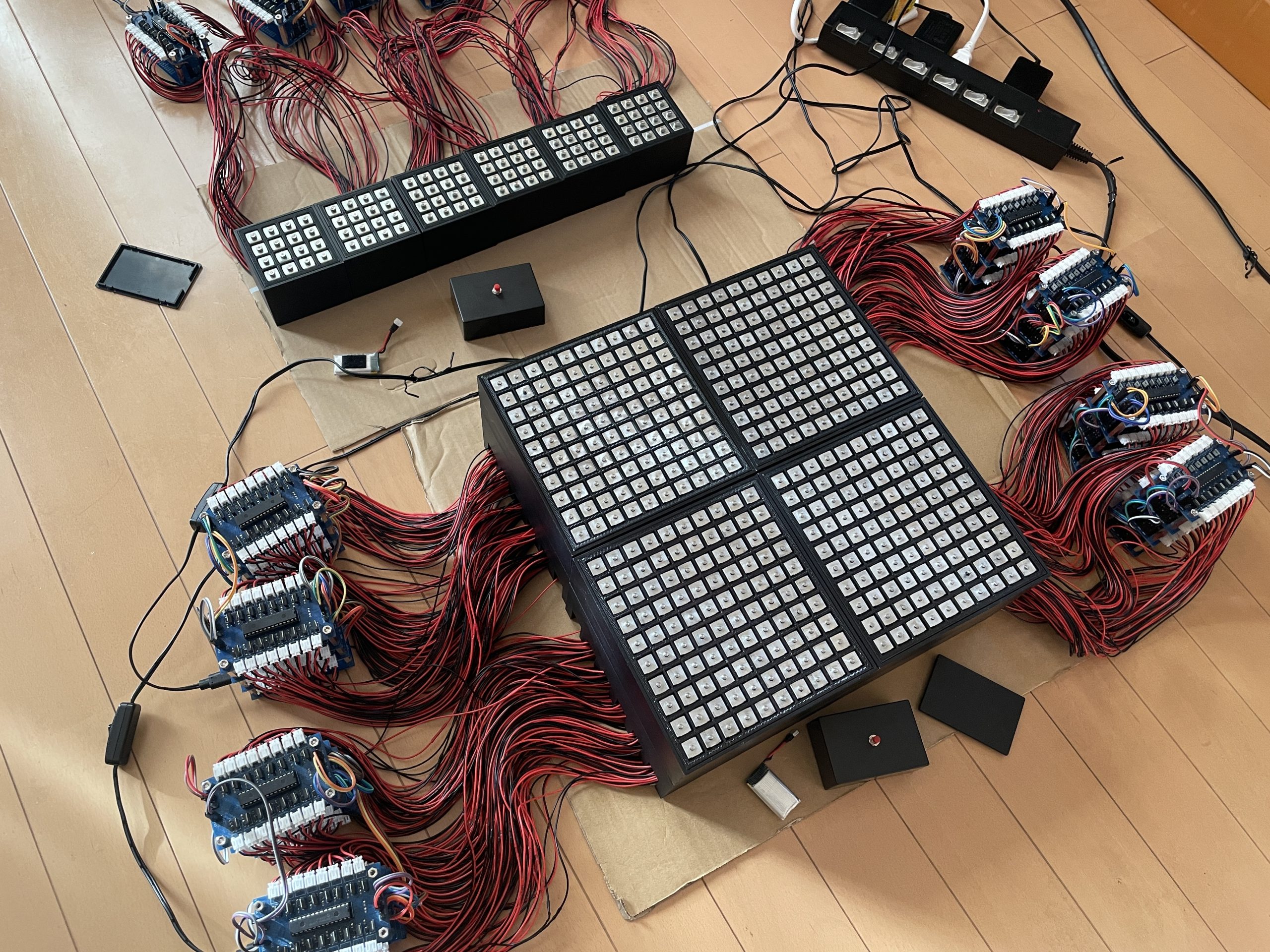
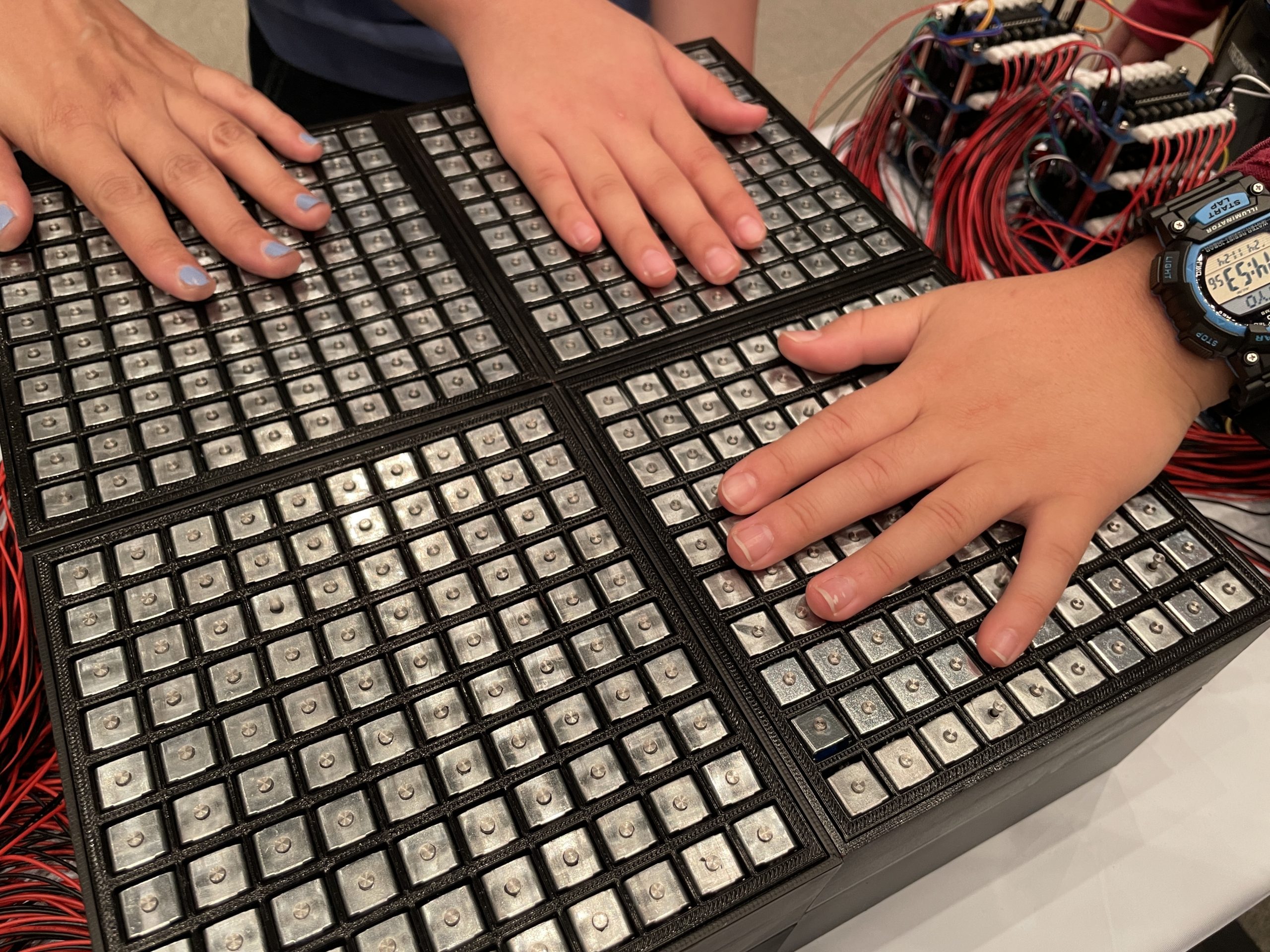
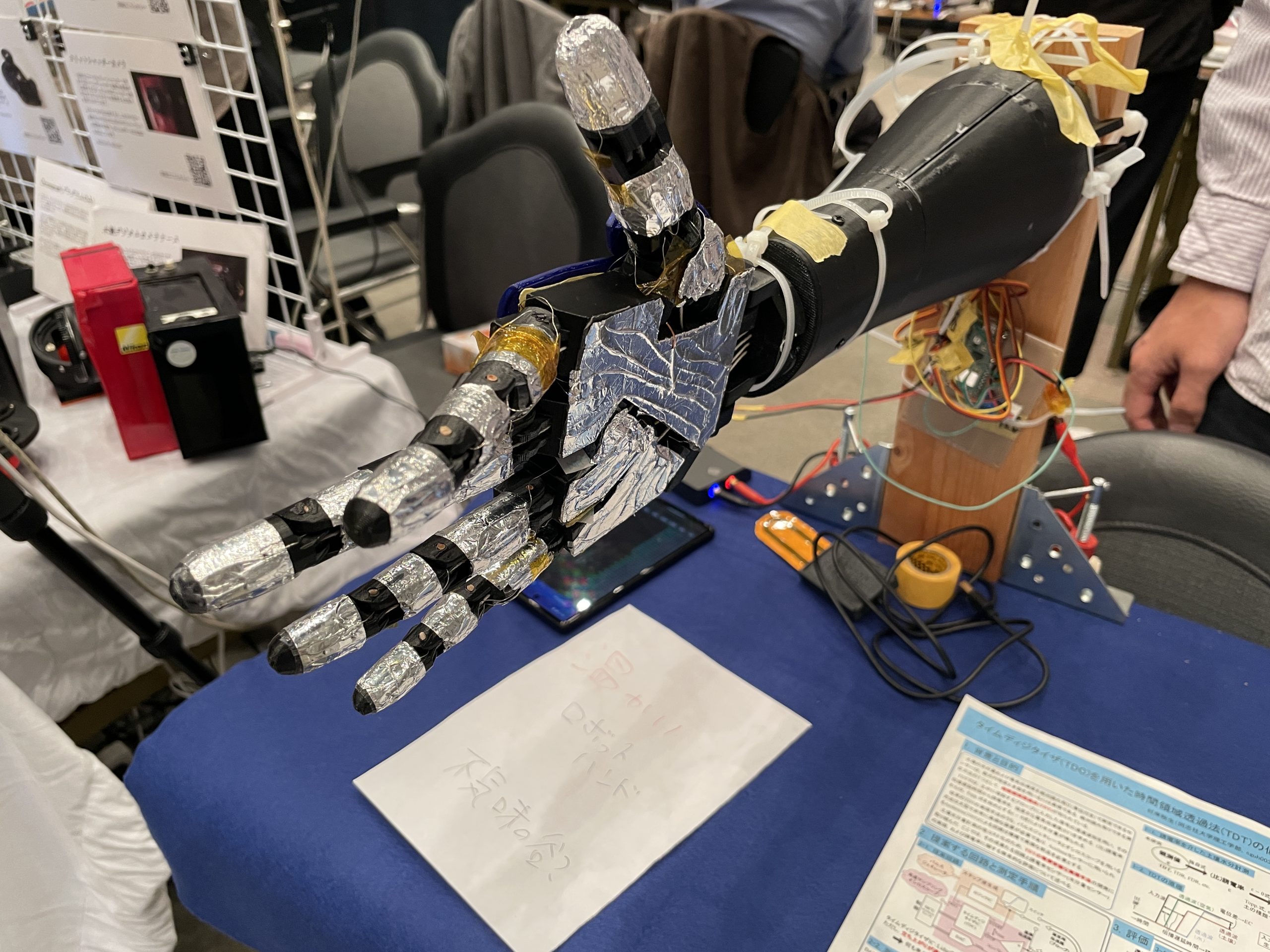
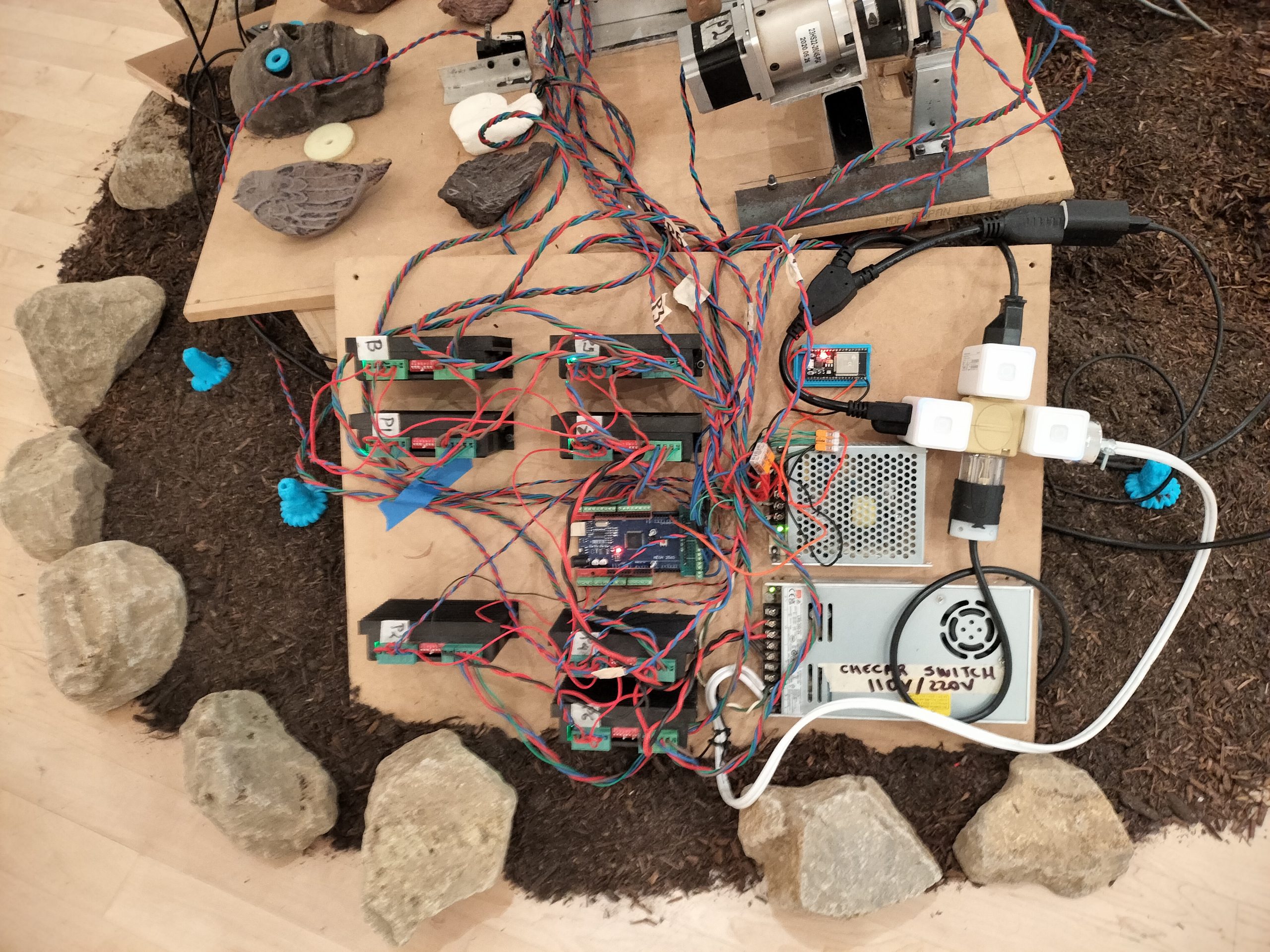
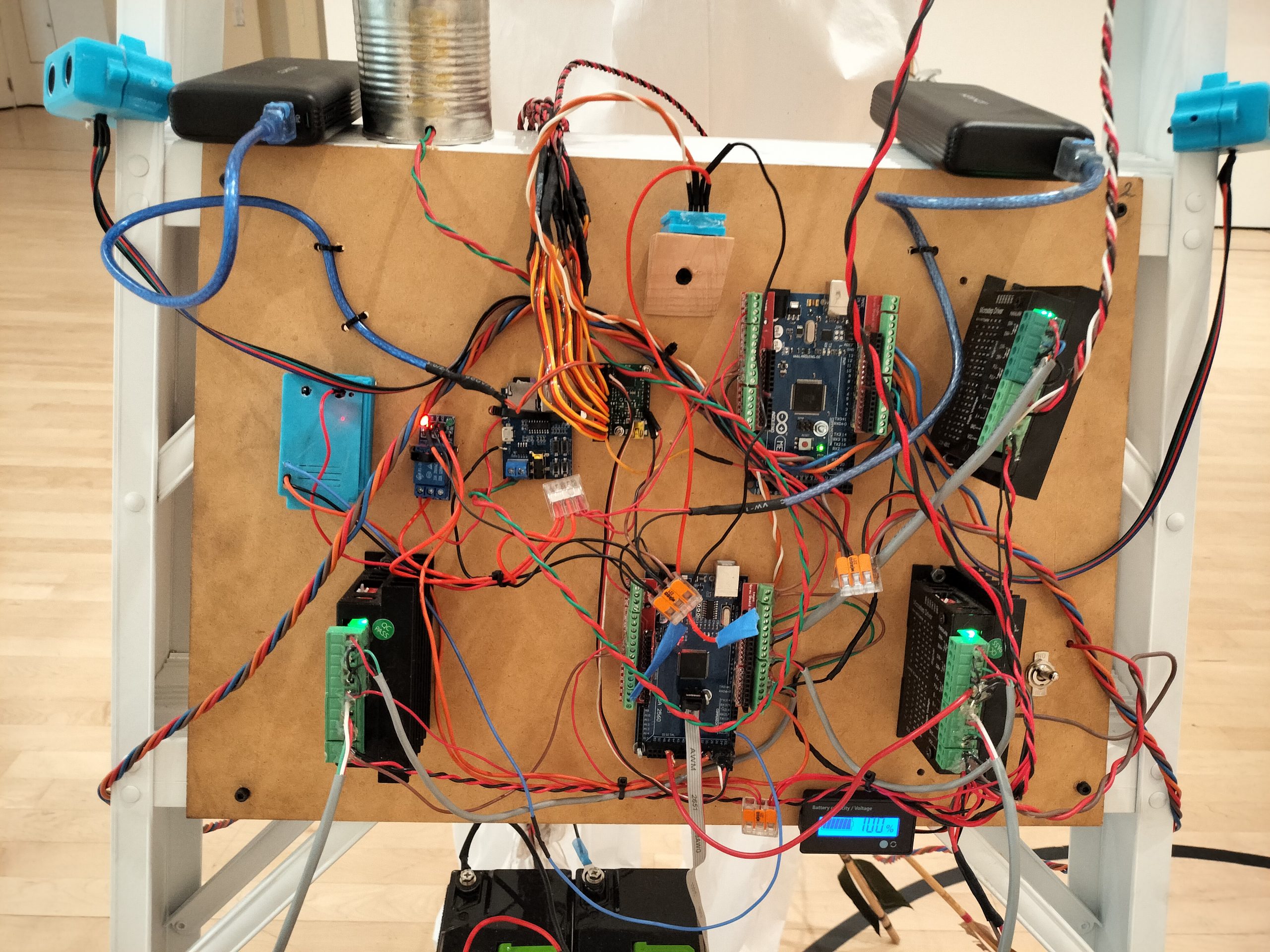
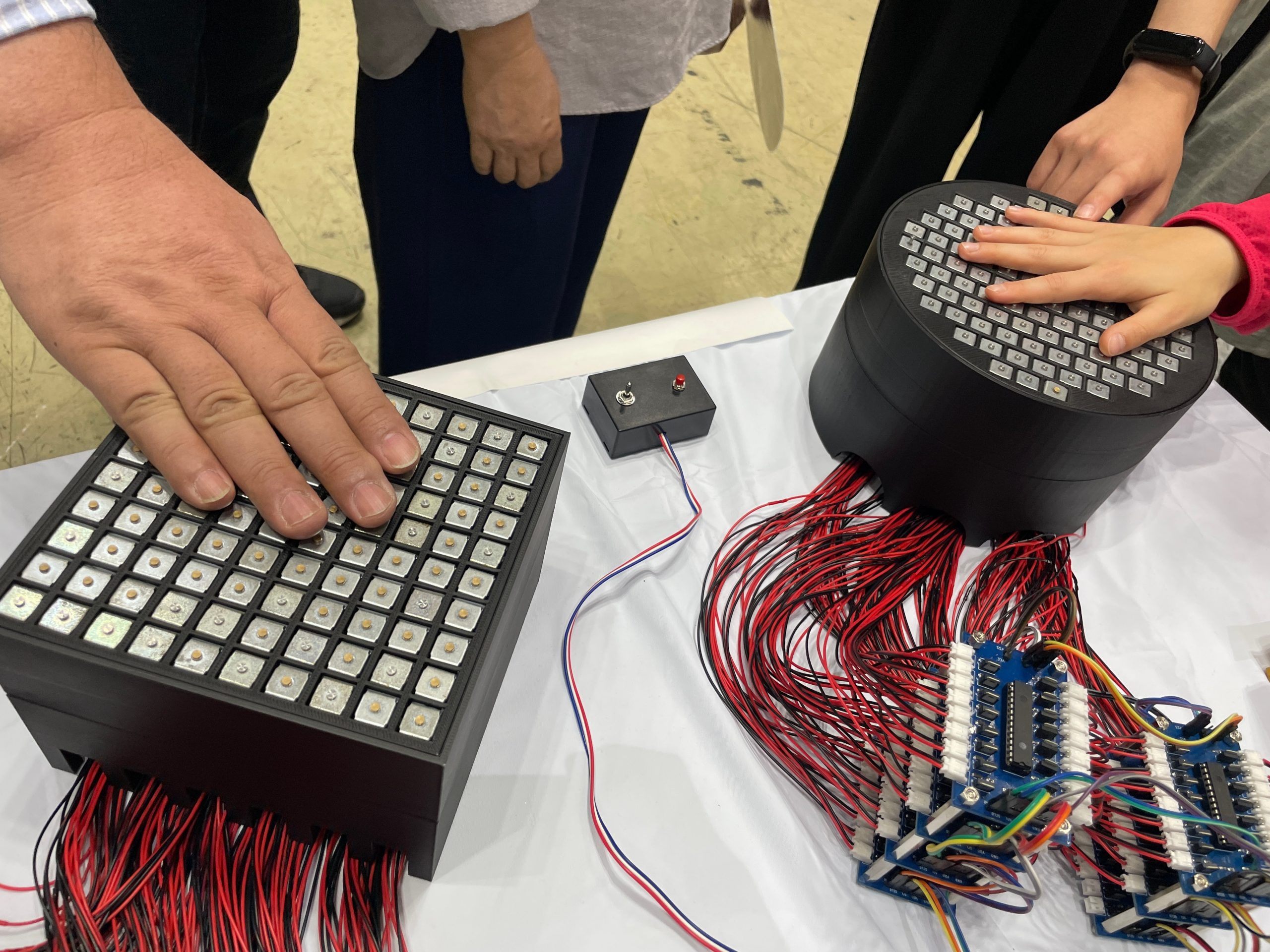
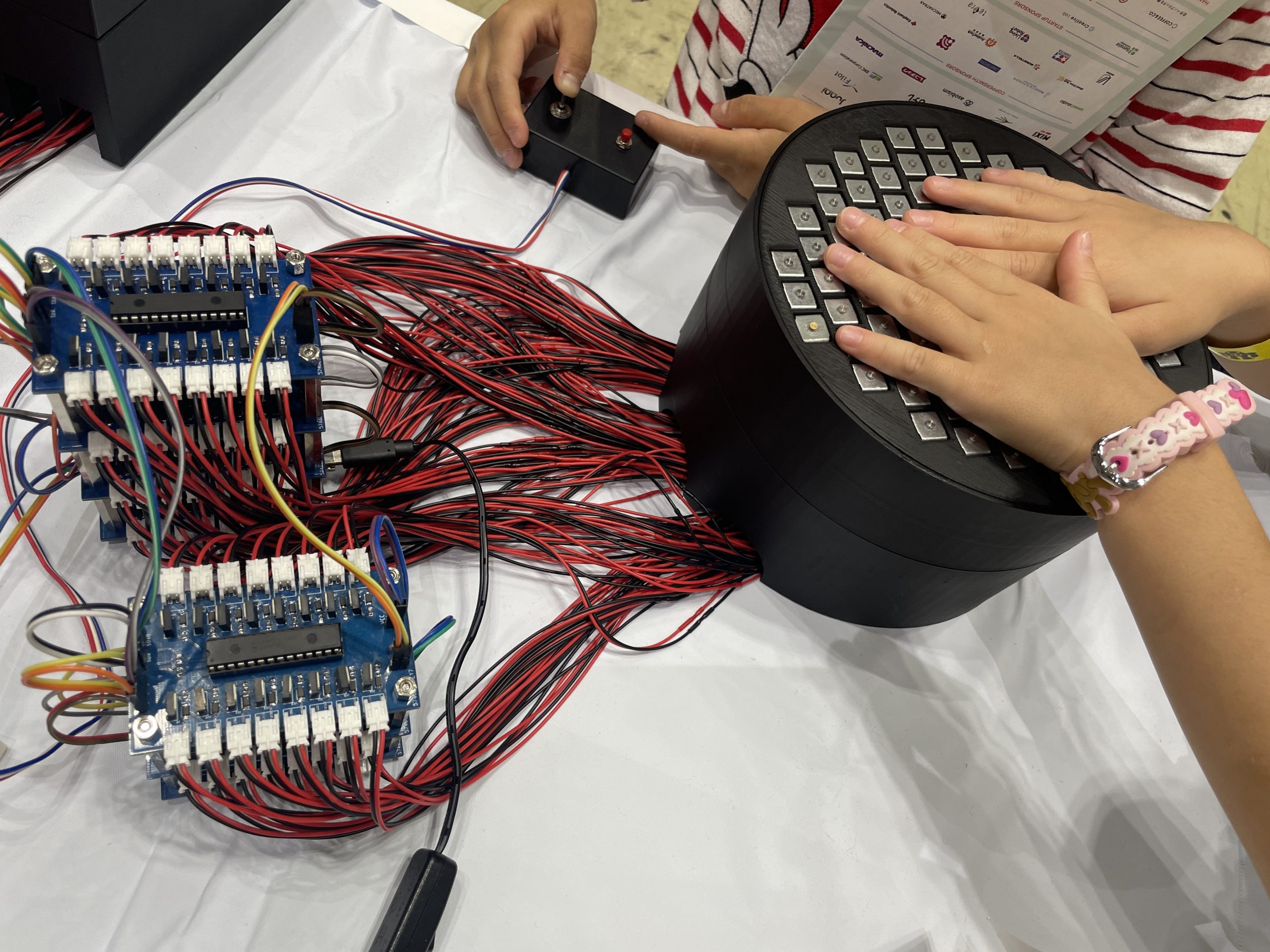
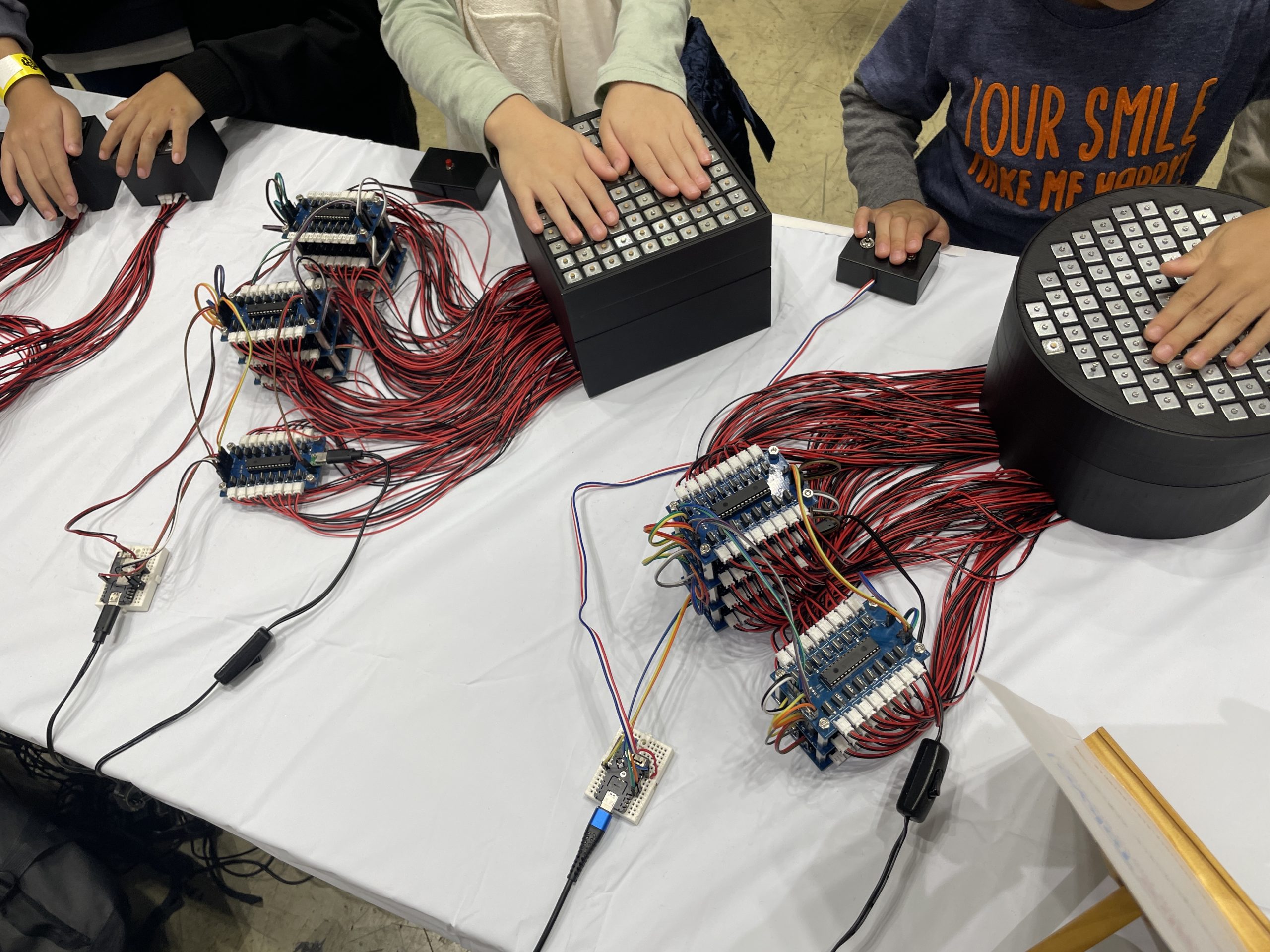
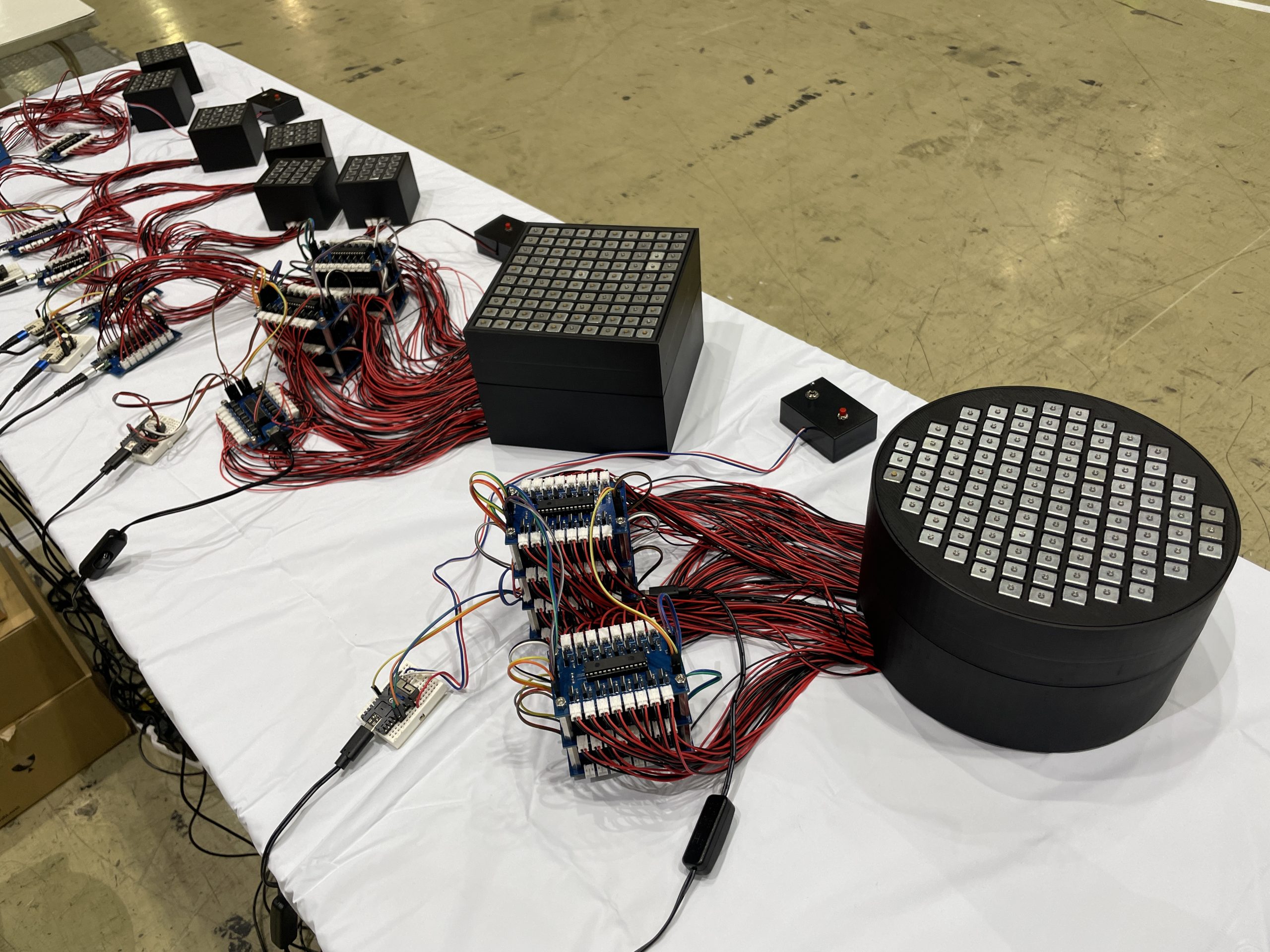
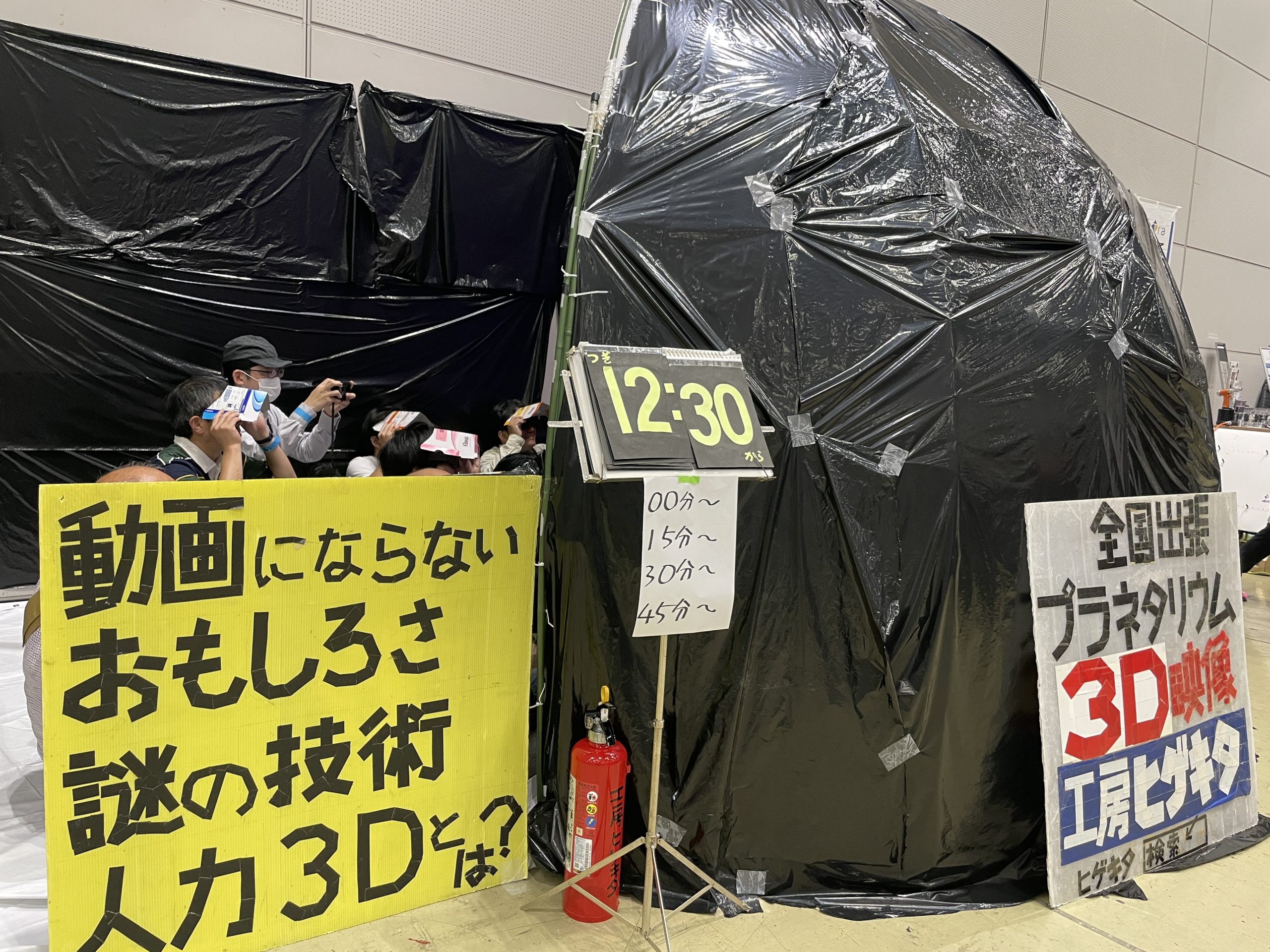
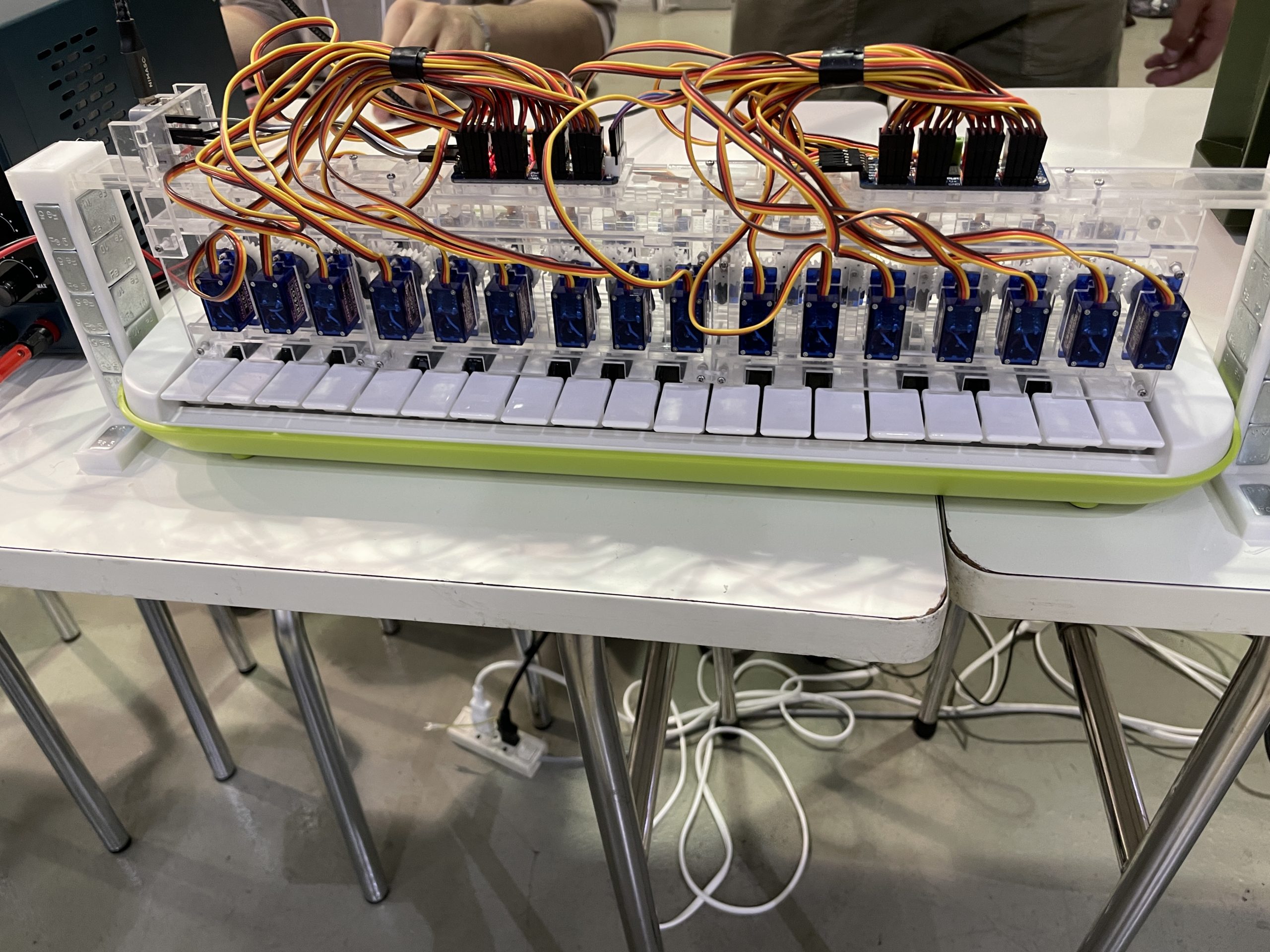
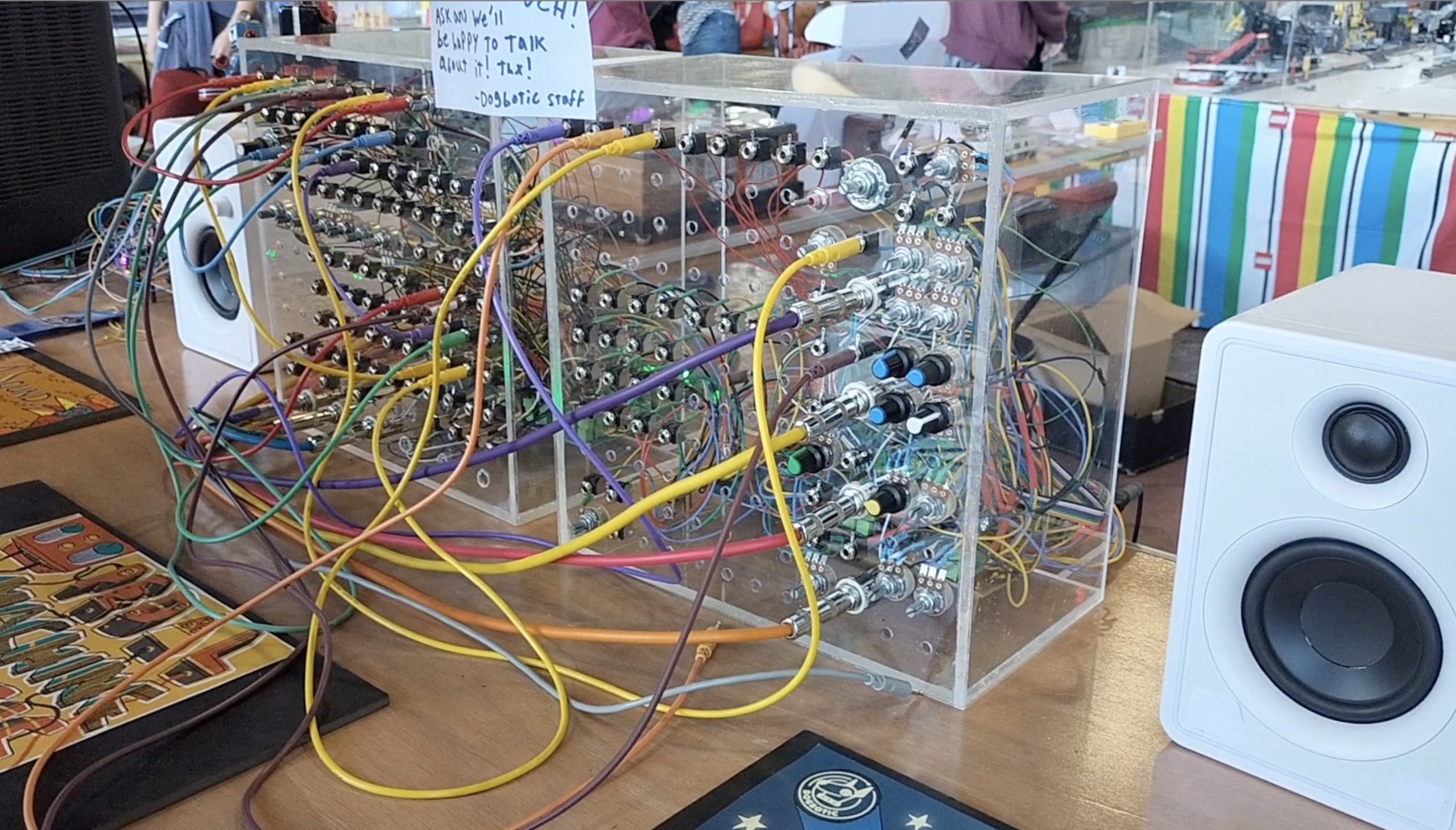
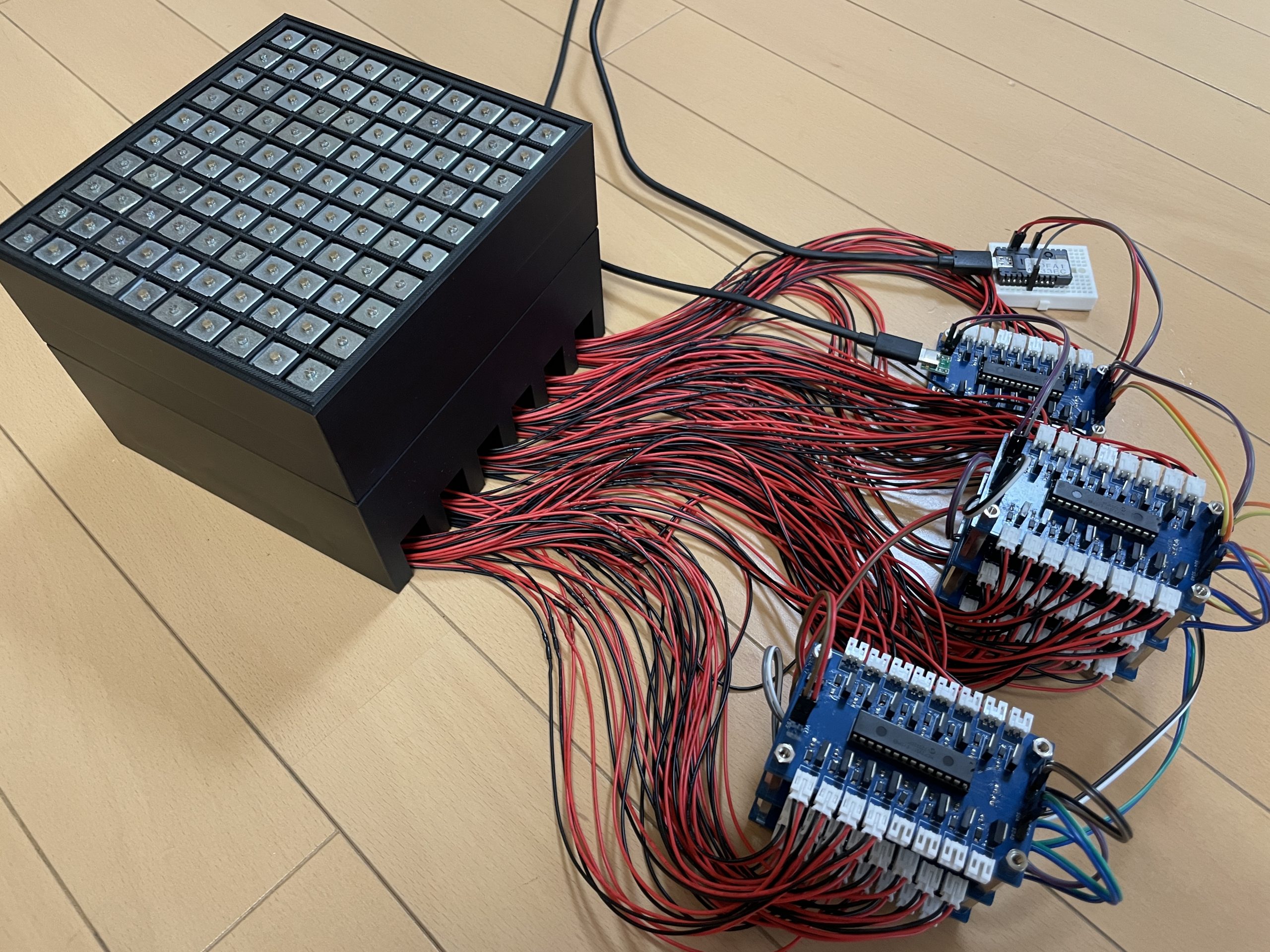
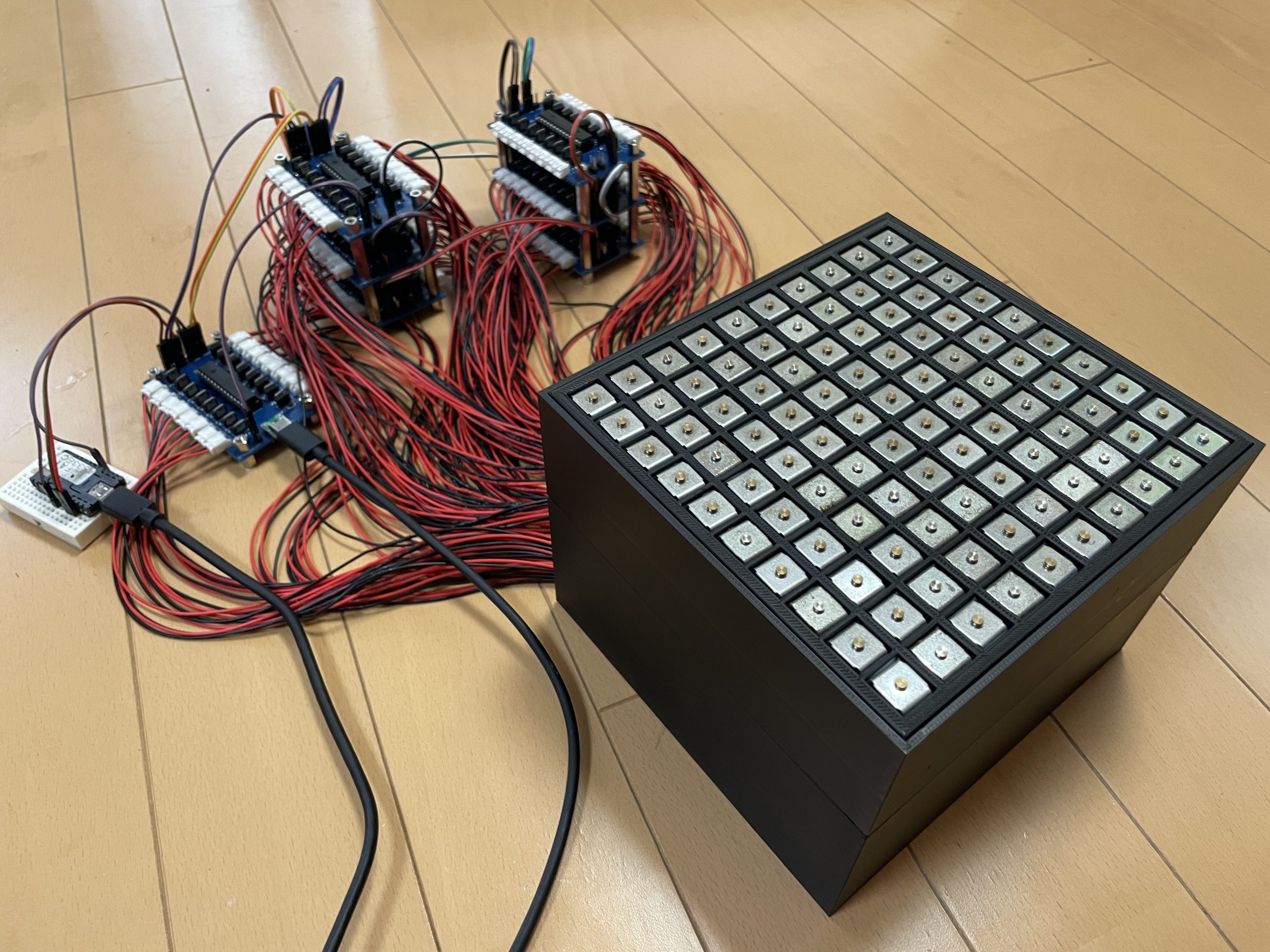
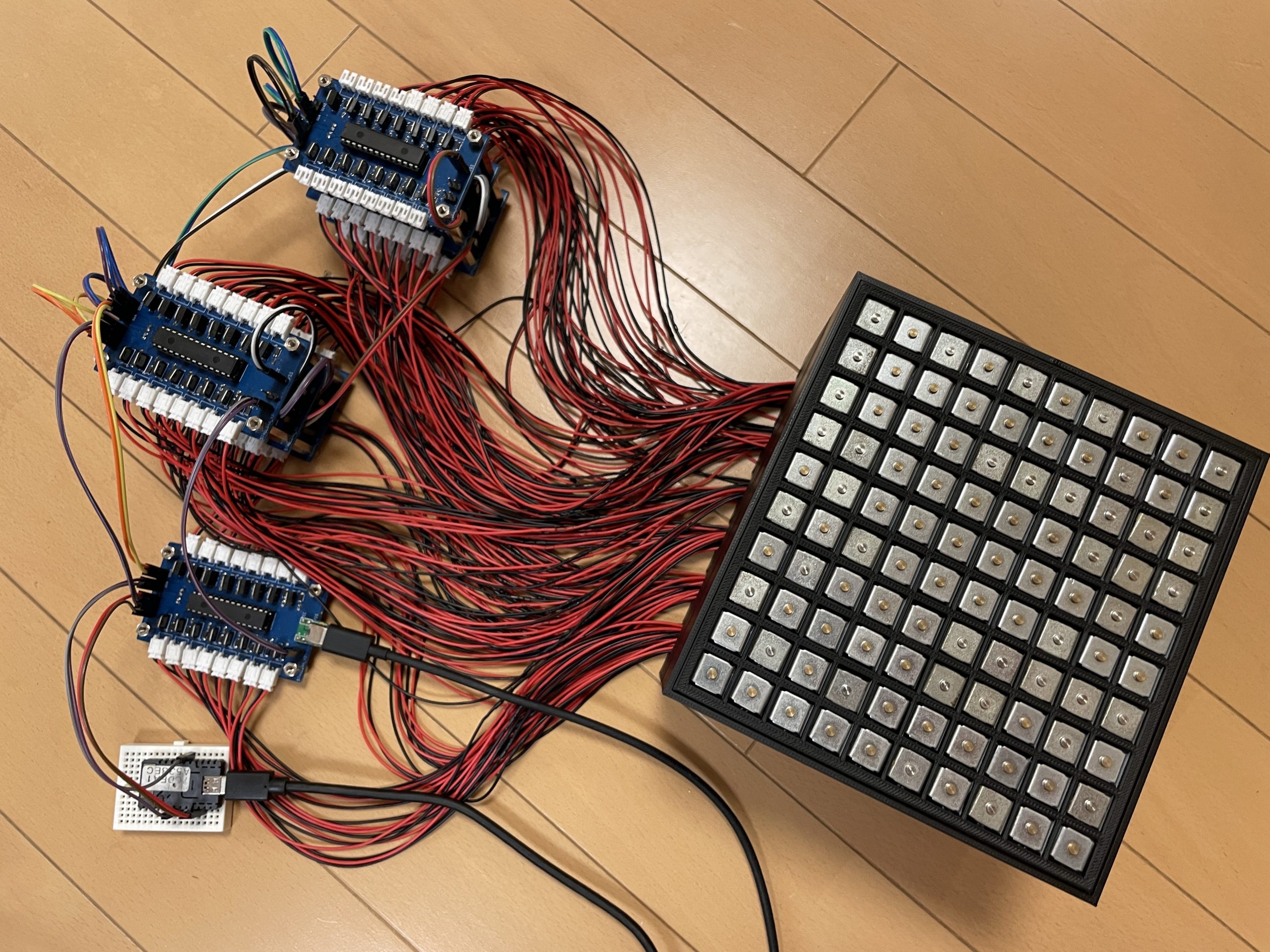
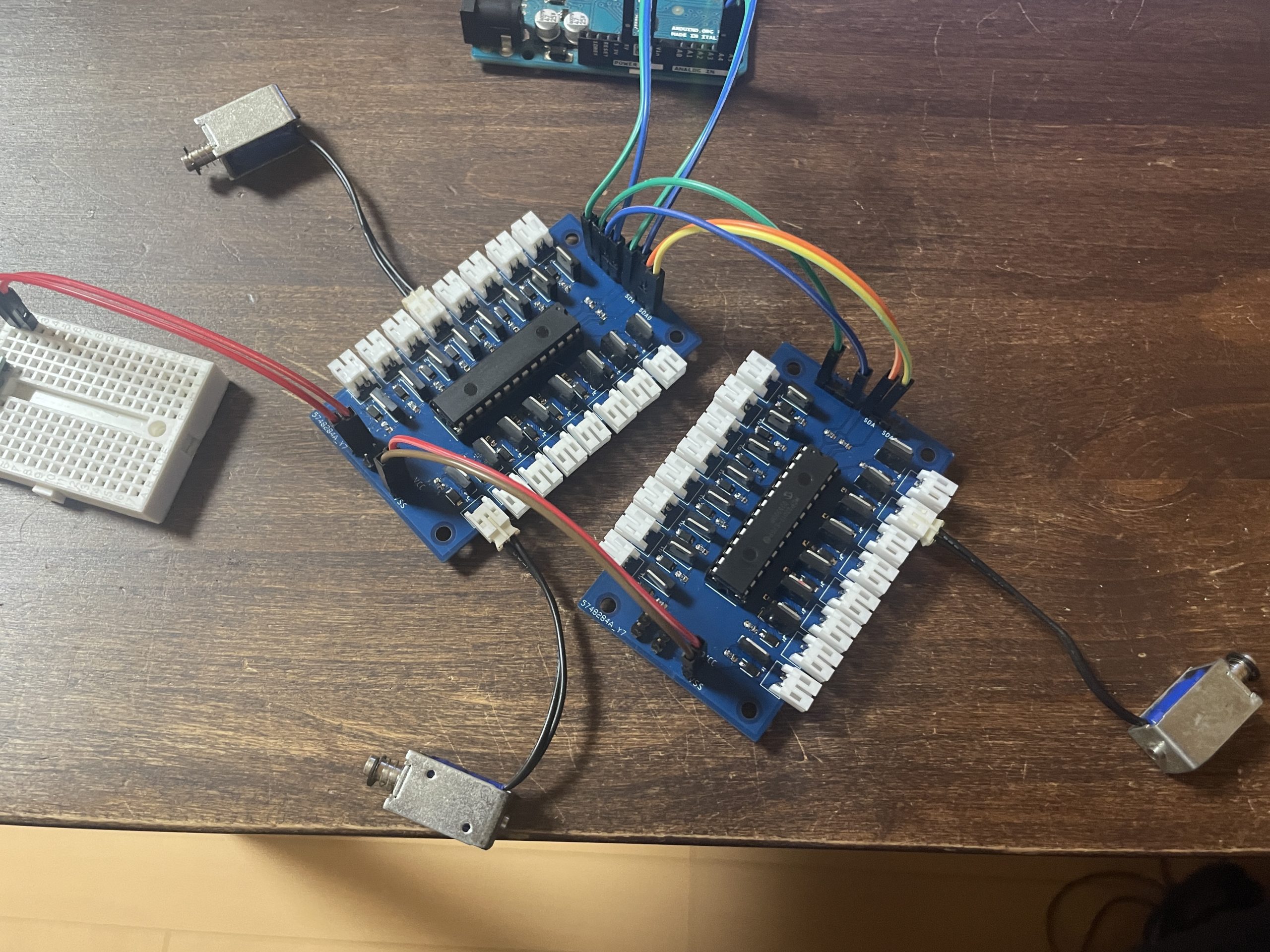
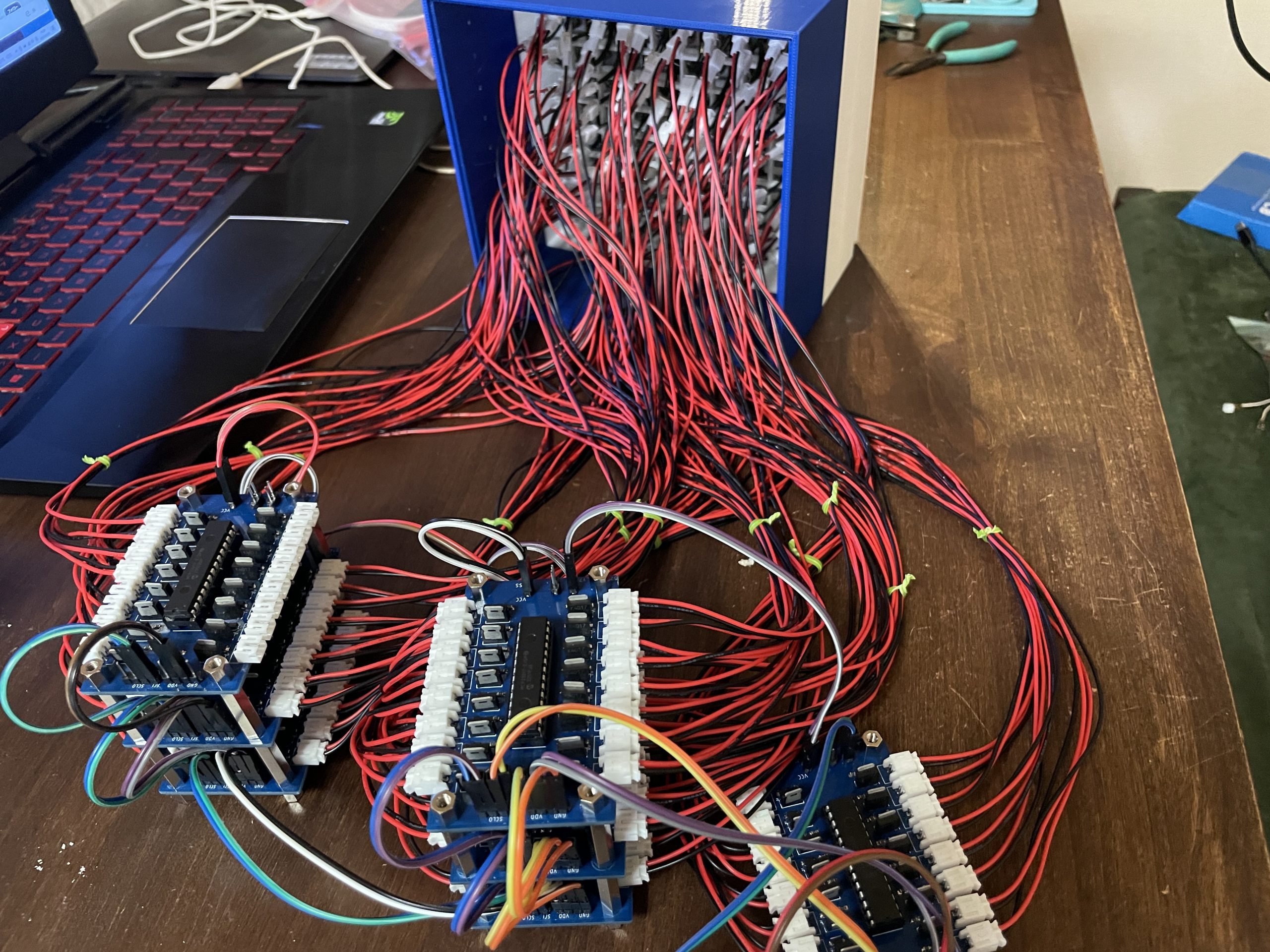
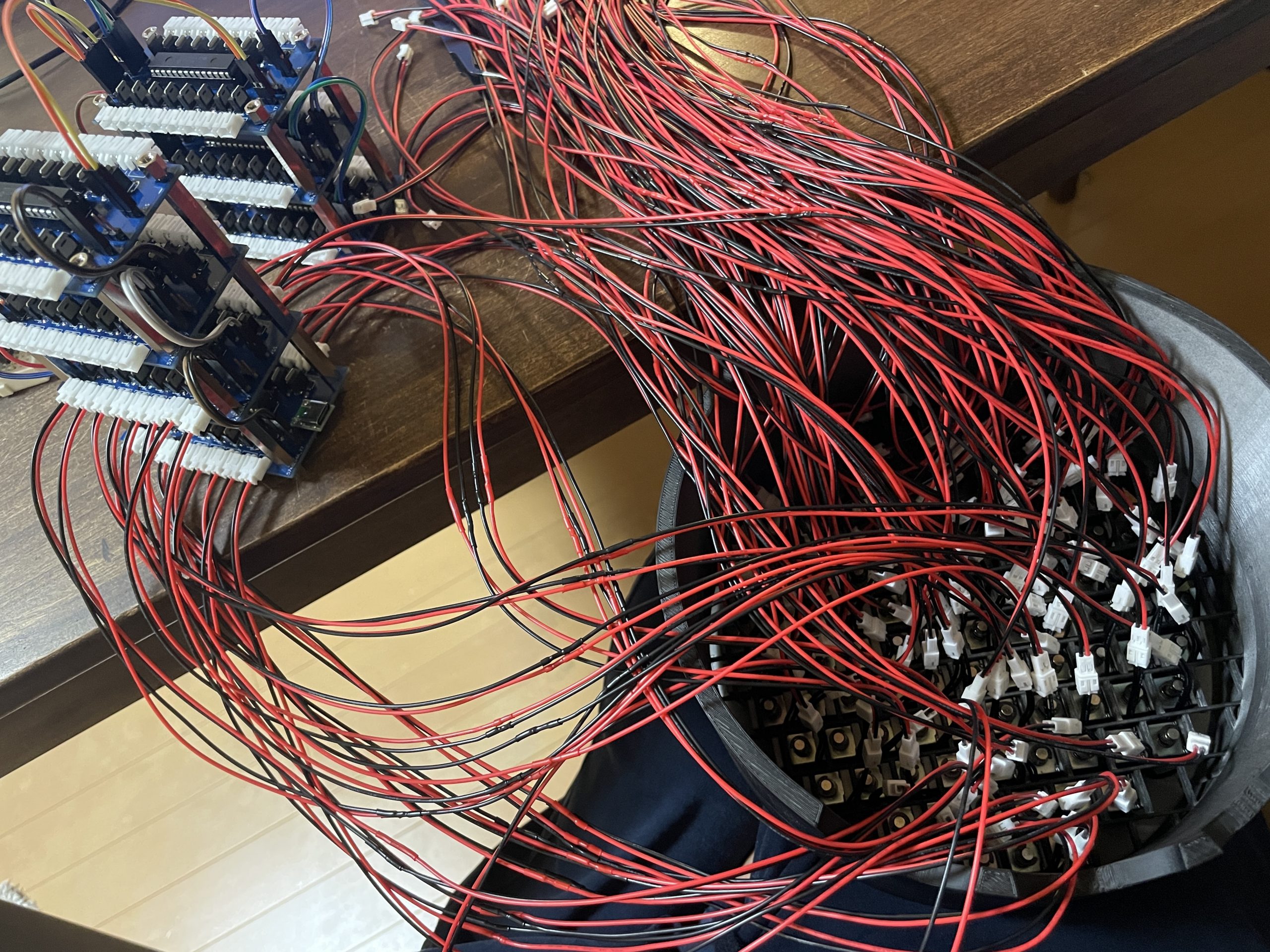
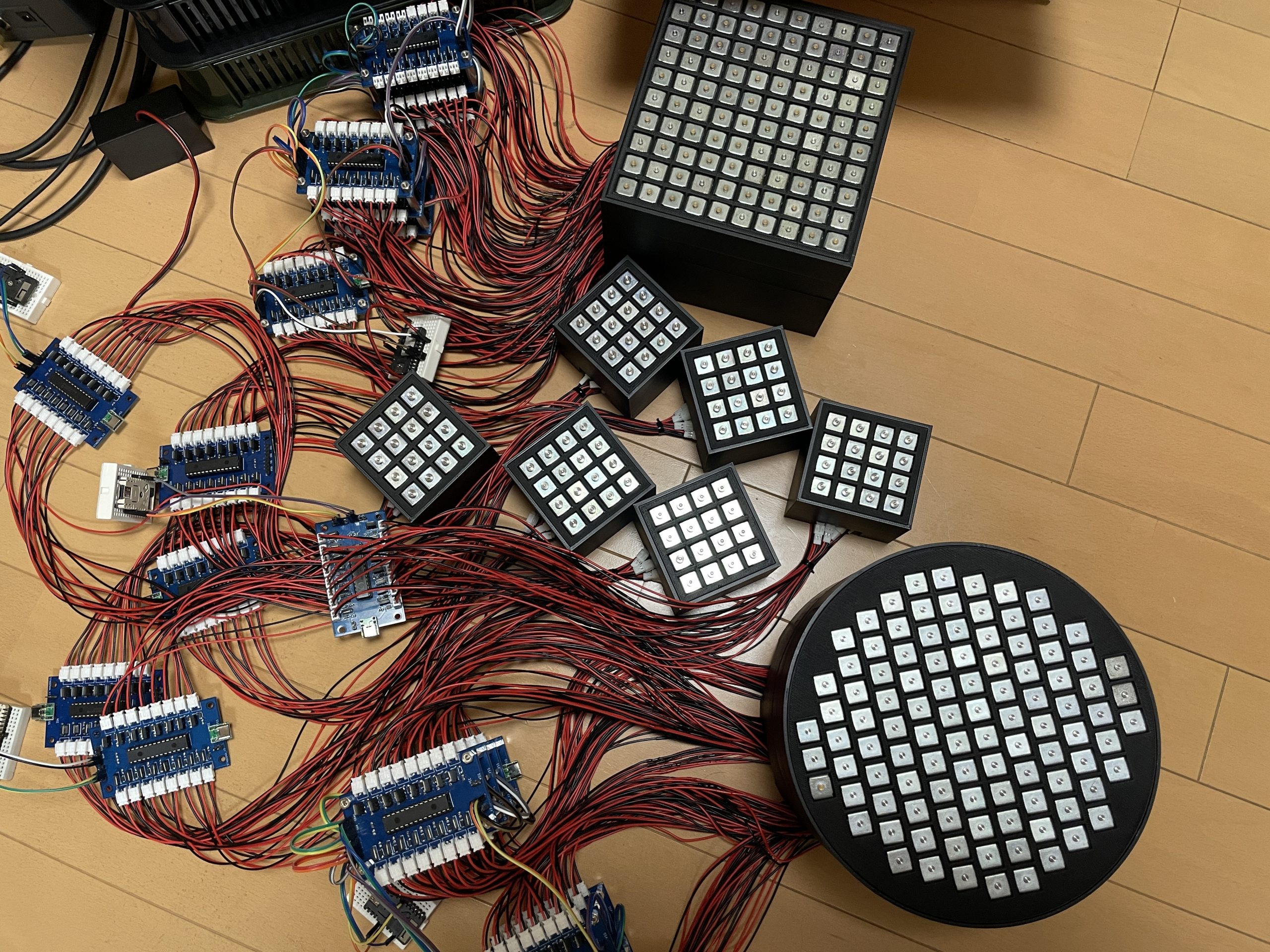
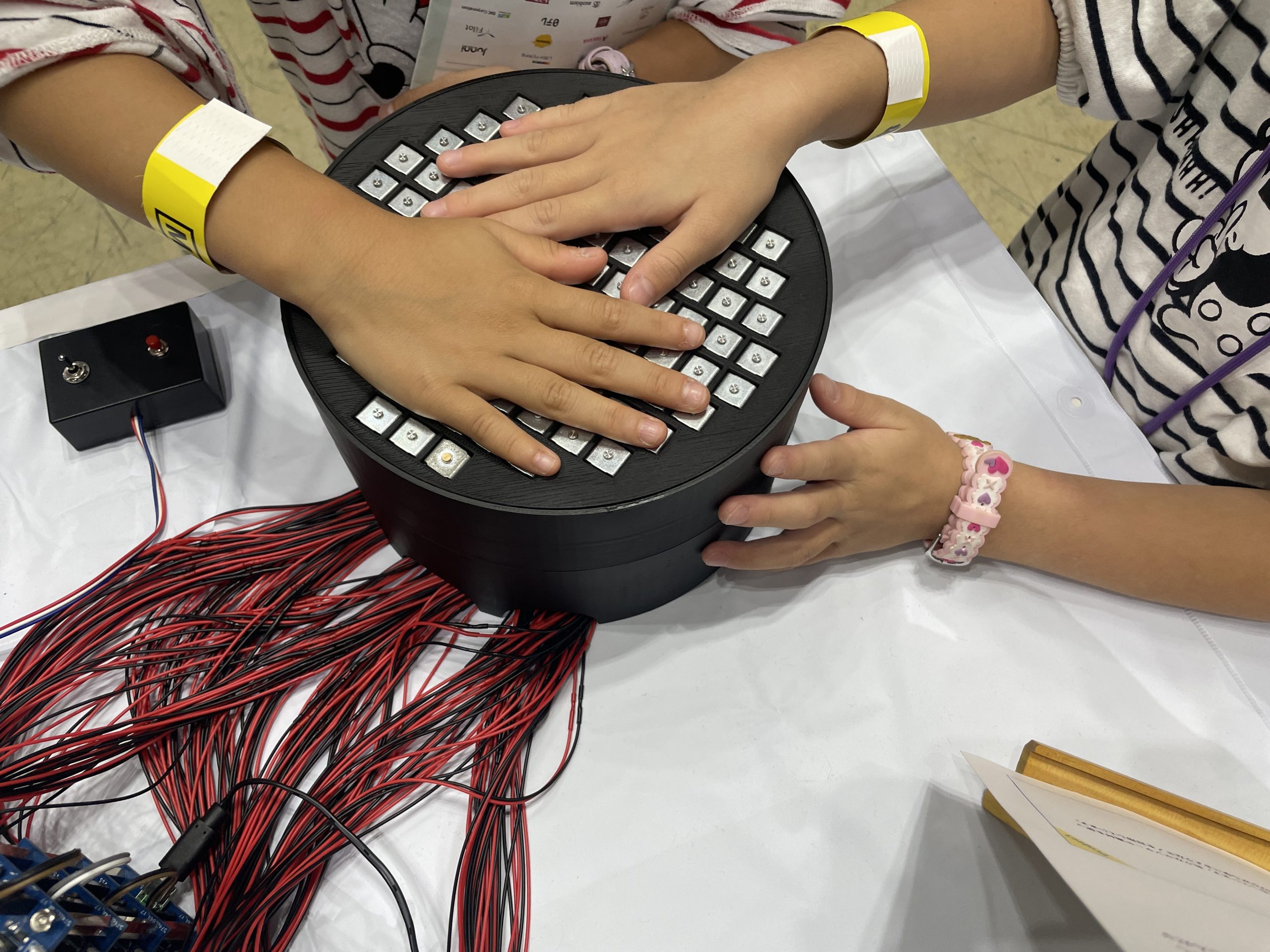
Maker Faire Tokyo 2024は仕事の方と重なって、めちゃくちゃ体力的にも限界に近かった。連続5日間、ビックサイトで展示というのは、体験的には面白いけど、本当にきつかった。そして、Ogakiはなんとなく、東工大でやっていたような感じがして過ごしやすく、楽しかった。 自分のモノは、本当に趣旨も何もなく、大量のソレノイドを同時制御したい、眼の前に大量にソレノイド・結線が並んだ、まだ見たことがない光景を最初に見るのは自分で、作って楽しくて最高じゃん!!という感情のままに作ったモノで、何か特別な理由がある訳じゃない。そんなモノでも見て・触れて貰えるのは嬉しくもあったりする。 ただ、自分だけじゃなく、展示していた他の制作者さんたちも、ユニークなモノばかりで、制作していて「最初に動いたとき、見たときの感動」を作り手・来場者さんたちと何かしら交流・共有~次につながる場としてもあるのかなーと感じたりするなど。
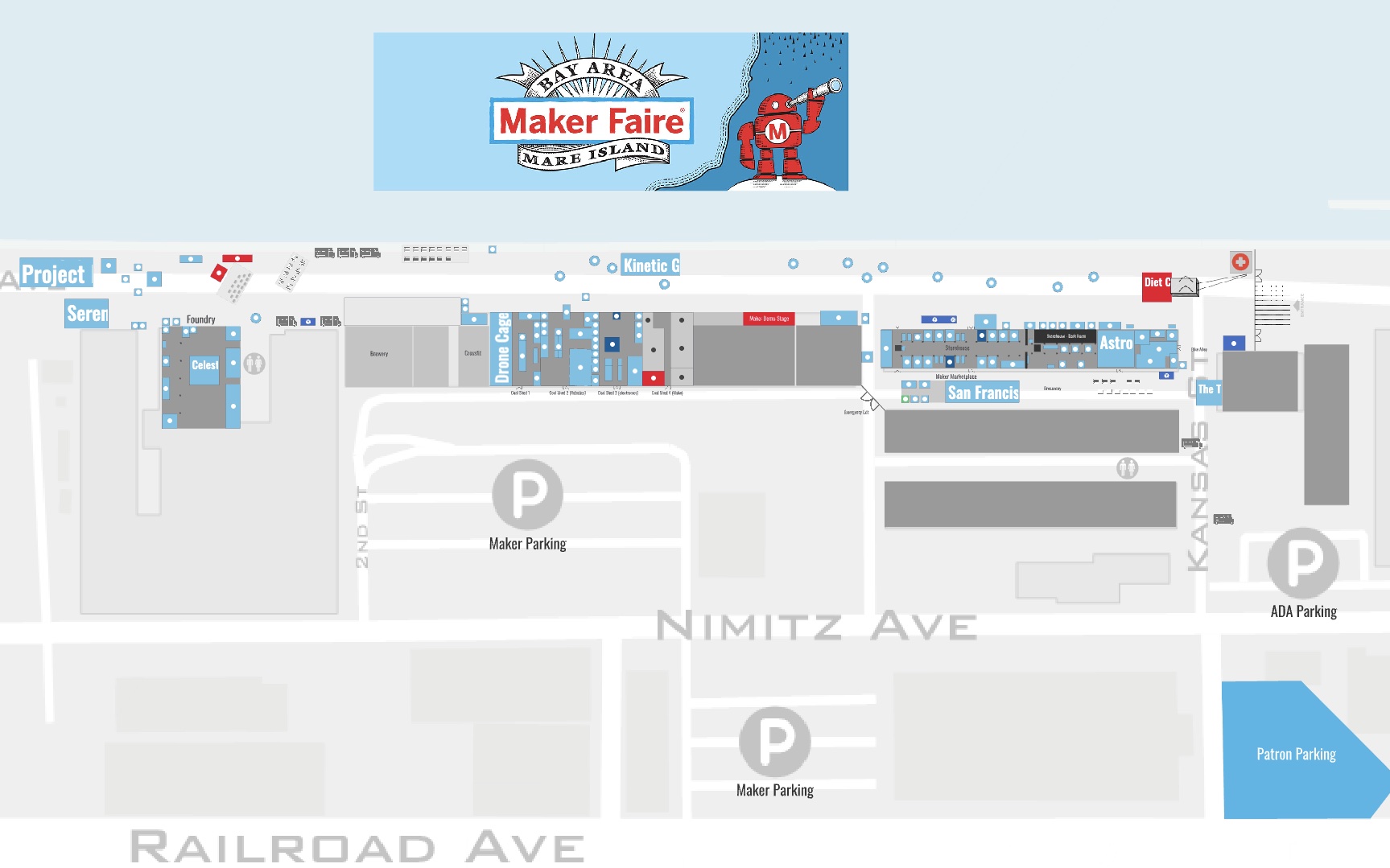
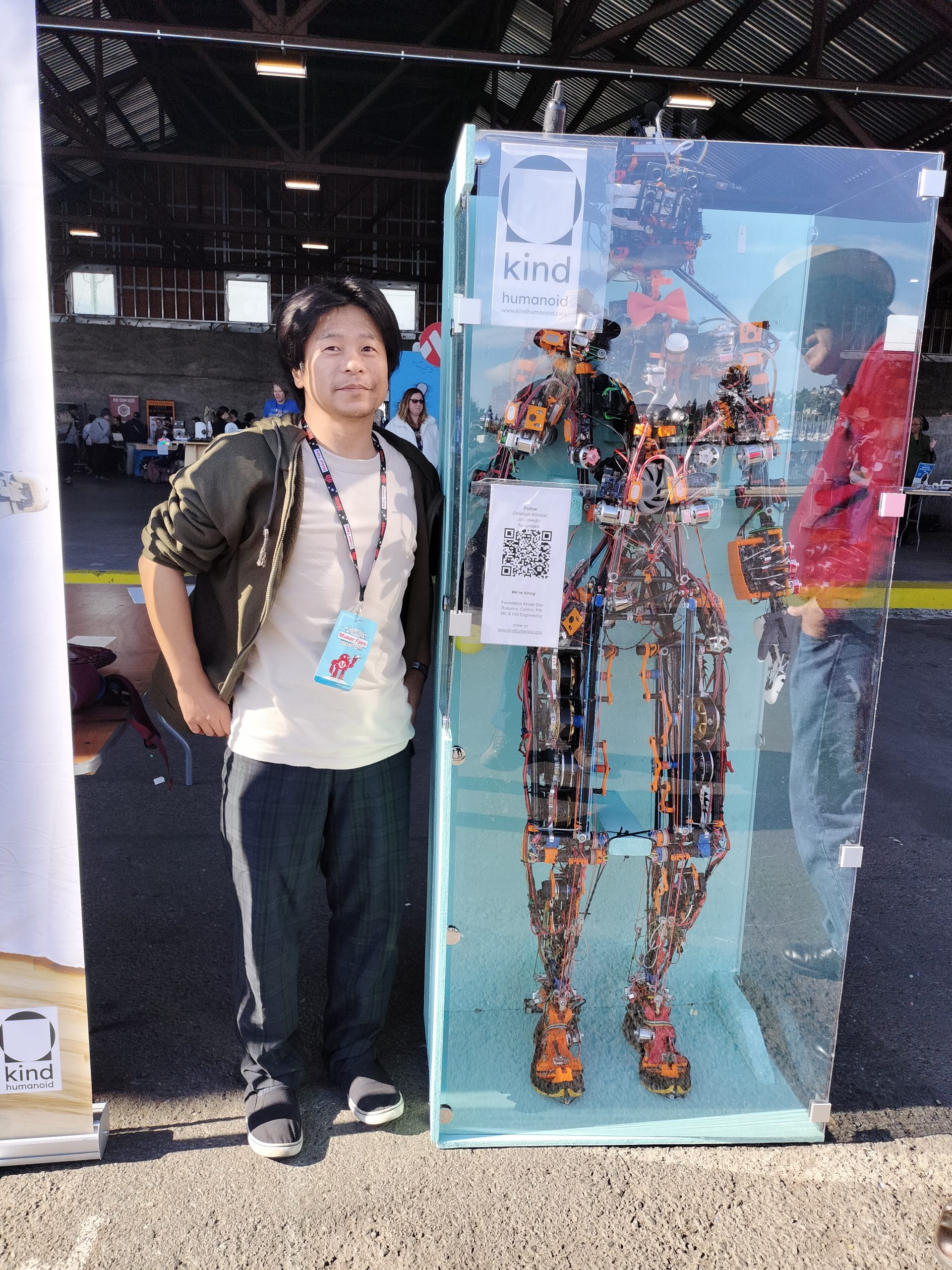
2019年のサンマテオで終わったと思ったBay Areaが再始動した。 体調悪化で微妙な終わり方をしたMaker Faire Bay Areaになったけど、勢いでエントリして行ってきて、4年ぶりに「お久しぶり」といった感じだった。 短期間に2箇所行ってみて、ユニークさのMaker Faire Tokyo、大物・ファイヤーはBay Areaみたいな感じはする。4年に一度の開催くらいのペースでも、再始動してまた来年のどちらでも、Maker Faire Bay Areaは続いていって欲しい。
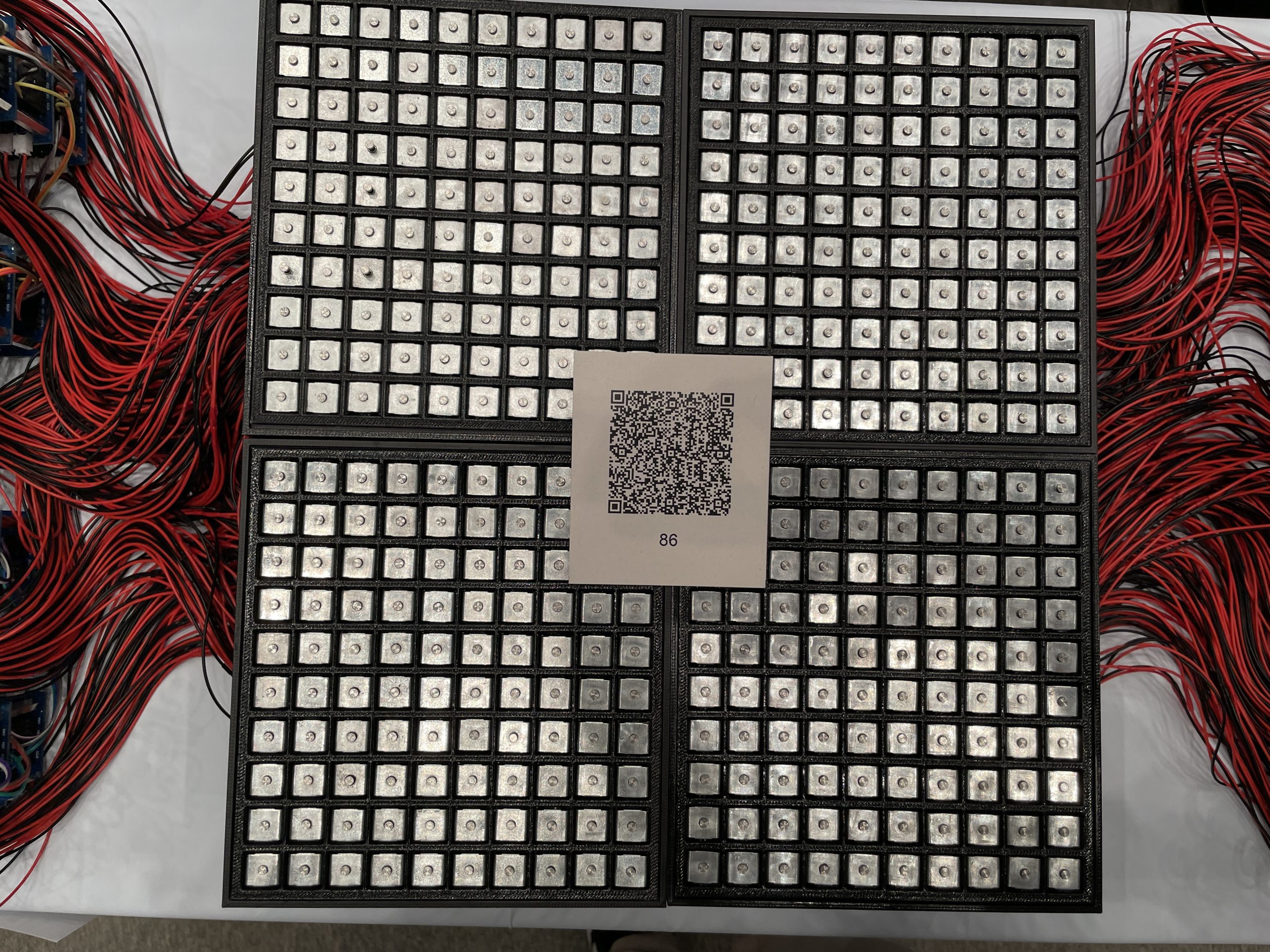
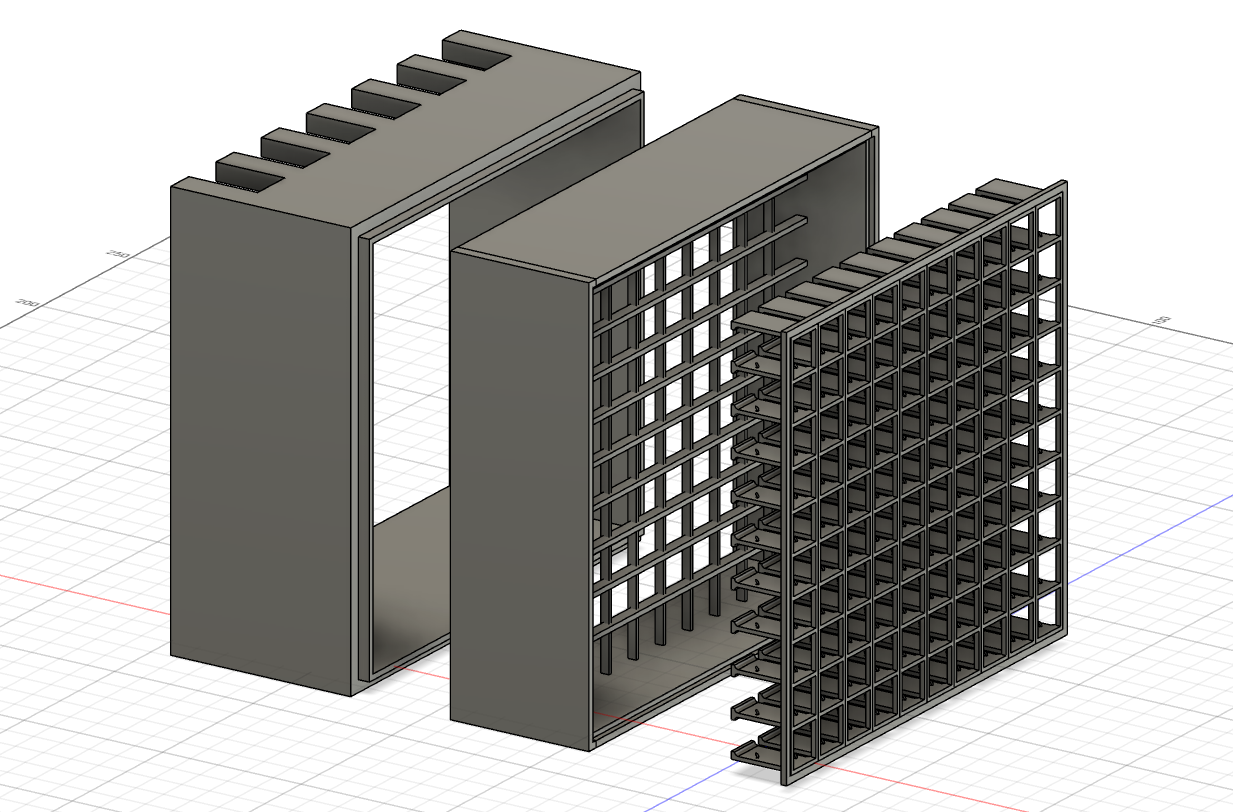
Solenoid mounter 3D model is three parts. Top is just an solenoids mounter, 2nd parts holds up to 100 solenoids and guides the cables, 3rd is guide to the output cables.
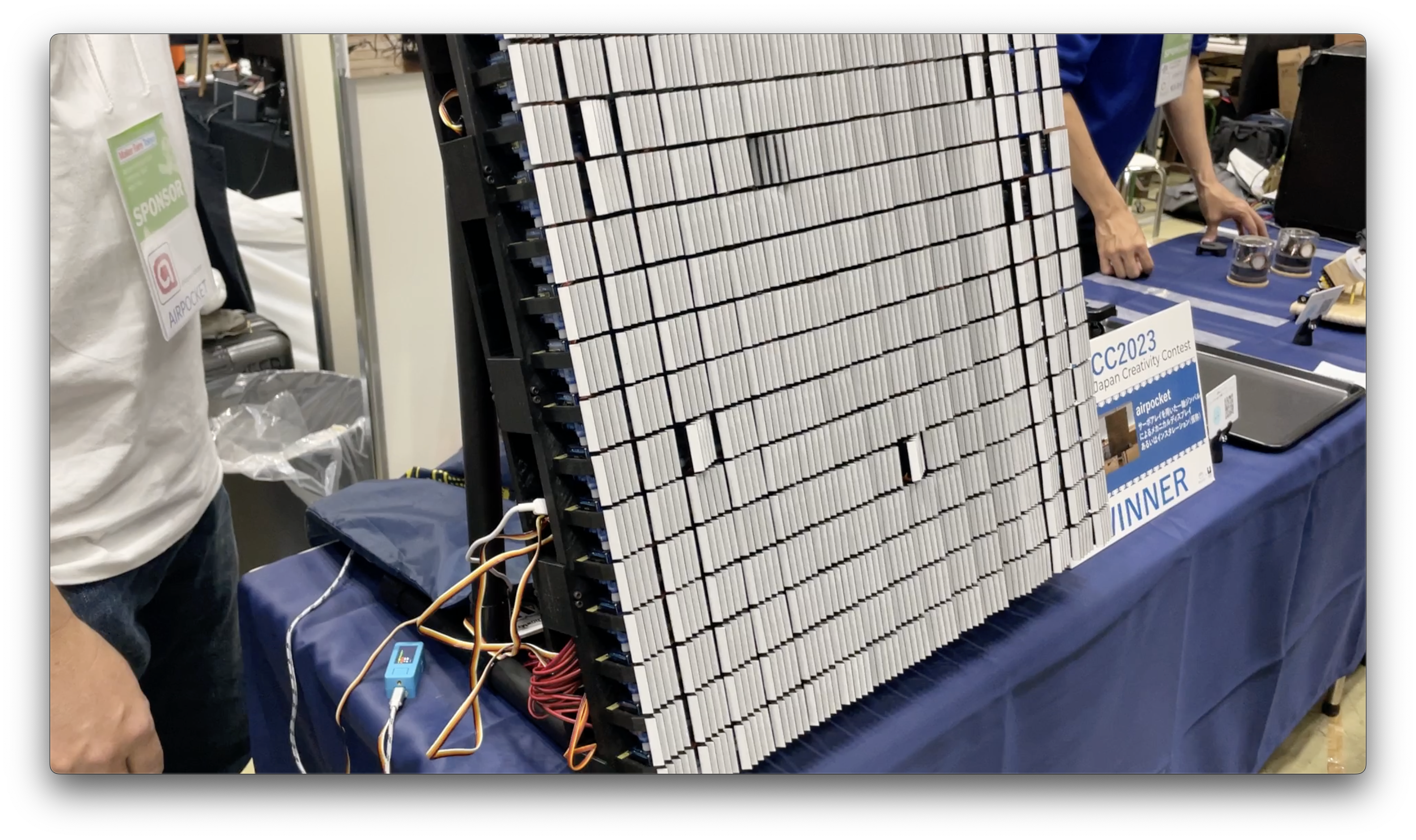
Exhibit at Maker Faire Tokyo 2023 with 4×4, 10×10, circle type.
int quic_mbedtls_decode_frame(const u_char *data, uint32_t length, QUIC_FRAME *frame) {
int i, j = 0;
for (i = 0; i < length;) {
u_char d = data[i];
if (data[i] == QUIC_FRAME_PADDING) {
i += 1;
} else if (data[i] == QUIC_FRAME_CRYPTO) {
frame[j].frame = &data[i];
i += 1;
uint8_t o, l;
uint64_t ov, lv;
// get crypt frame offset
quic_mbedtls_conv_vlie(data + i, &o, &ov);
i += o;
// get crypt frame length
quic_mbedtls_conv_vlie(data + i, &l, &lv);
i += l;
i += lv;
frame[j].type = QUIC_FRAME_CRYPTO;
frame[j].length = 1 + o + l + lv;
j += 1;
} else if (data[i] == QUIC_FRAME_PING) {
// とりあえず無視
i += 1;
} else if (data[i] == QUIC_FRAME_ACK_2 || data[i] == QUIC_FRAME_ACK_3) {
frame[j].frame = &data[i];
i += 1;
uint8_t la, ad, arc, far, ar;
uint64_t lav, adv, arcv, farv, arv;
// get largetst ack
quic_mbedtls_conv_vlie(data + i, &la, &lav);
i += la;
// get ack delay
quic_mbedtls_conv_vlie(data + i, &ad, &adv);
i += ad;
// get ack range count
quic_mbedtls_conv_vlie(data + i, &arc, &arcv);
i += arc;
// get first ack range
quic_mbedtls_conv_vlie(data + i, &far, &farv);
i += far;
frame[j].type = QUIC_FRAME_ACK_2;
frame[j].length = 1 + la + ad + arc + far;
j += 1;
}
}
return j;
}
Reading package lists...
Building dependency tree...
Reading state information...
The following package was automatically installed and is no longer required:
libnvidia-common-460
Use 'apt autoremove' to remove it.
The following additional packages will be installed:
libcgroup1
The following NEW packages will be installed:
cgroup-tools libcgroup1
0 upgraded, 2 newly installed, 0 to remove and 62 not upgraded.
Need to get 108 kB of archives.
After this operation, 393 kB of additional disk space will be used.
Get:1 http://archive.ubuntu.com/ubuntu bionic/universe amd64 libcgroup1 amd64 0.41-8ubuntu2 [42.0 kB]
Get:2 http://archive.ubuntu.com/ubuntu bionic/universe amd64 cgroup-tools amd64 0.41-8ubuntu2 [66.2 kB]
Fetched 108 kB in 0s (1,138 kB/s)
Selecting previously unselected package libcgroup1:amd64.
(Reading database ... 155639 files and directories currently installed.)
Preparing to unpack .../libcgroup1_0.41-8ubuntu2_amd64.deb ...
Unpacking libcgroup1:amd64 (0.41-8ubuntu2) ...
Selecting previously unselected package cgroup-tools.
Preparing to unpack .../cgroup-tools_0.41-8ubuntu2_amd64.deb ...
Unpacking cgroup-tools (0.41-8ubuntu2) ...
Setting up libcgroup1:amd64 (0.41-8ubuntu2) ...
Setting up cgroup-tools (0.41-8ubuntu2) ...
Processing triggers for man-db (2.8.3-2ubuntu0.1) ...
Processing triggers for libc-bin (2.27-3ubuntu1.3) ...
/sbin/ldconfig.real: /usr/local/lib/python3.7/dist-packages/ideep4py/lib/libmkldnn.so.0 is not a symbolic link
WARNING: apt does not have a stable CLI interface. Use with caution in scripts.
!/content/elasticsearch-8.3.1/bin/elasticsearch-setup-passwords auto -url "https://localhost:9200"
******************************************************************************
Note: The 'elasticsearch-setup-passwords' tool has been deprecated. This command will be removed in a future release.
******************************************************************************
Initiating the setup of passwords for reserved users elastic,apm_system,kibana,kibana_system,logstash_system,beats_system,remote_monitoring_user.
The passwords will be randomly generated and printed to the console.
Please confirm that you would like to continue [y/N]y
Changed password for user apm_system
PASSWORD apm_system = 5wJfMLTnkHwSY7lbpr6y
Changed password for user kibana_system
PASSWORD kibana_system = rE40UfIbndtwONL6q33D
Changed password for user kibana
PASSWORD kibana = rE40UfIbndtwONL6q33D
Changed password for user logstash_system
PASSWORD logstash_system = DOJfaIC9toV7tgJB33ON
Changed password for user beats_system
PASSWORD beats_system = iVpsYjuzPaL6wIOZQEKx
Changed password for user remote_monitoring_user
PASSWORD remote_monitoring_user = wsxURS5iLLi3hrSf8qw9
Changed password for user elastic
PASSWORD elastic = Uzv4aE6oFfpMrDVy1nql
check a elastic process, live page. “Enter host password for user ‘elastic’:” use above elastic user password.¶
Enter host password for user 'elastic':
{"_index":"playground","_id":"oLPQ-4EBI_biyaanZoqU","_version":1,"result":"created","_shards":{"total":2,"successful":1,"failed":0},"_seq_no":0,"_primary_term":1}
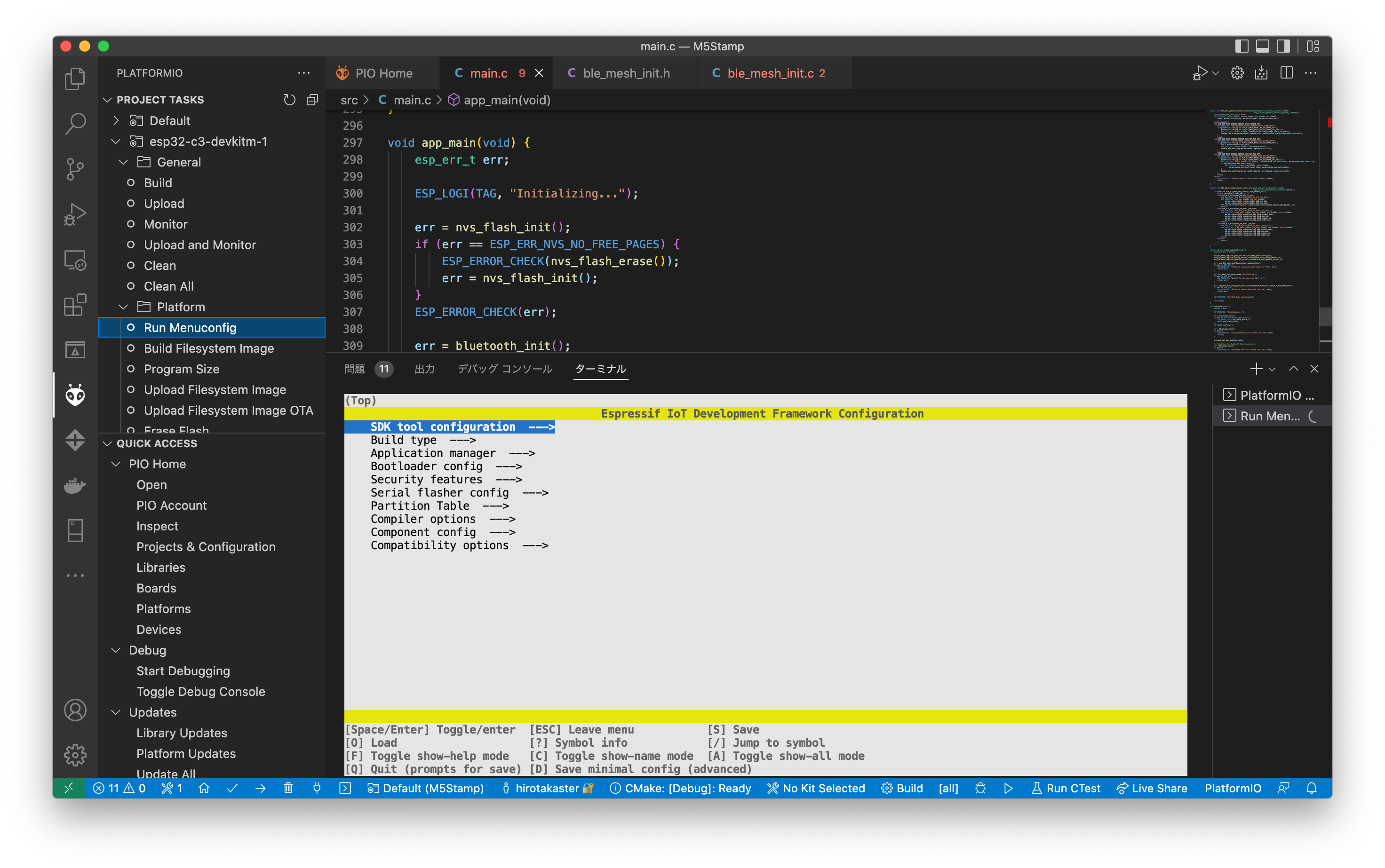
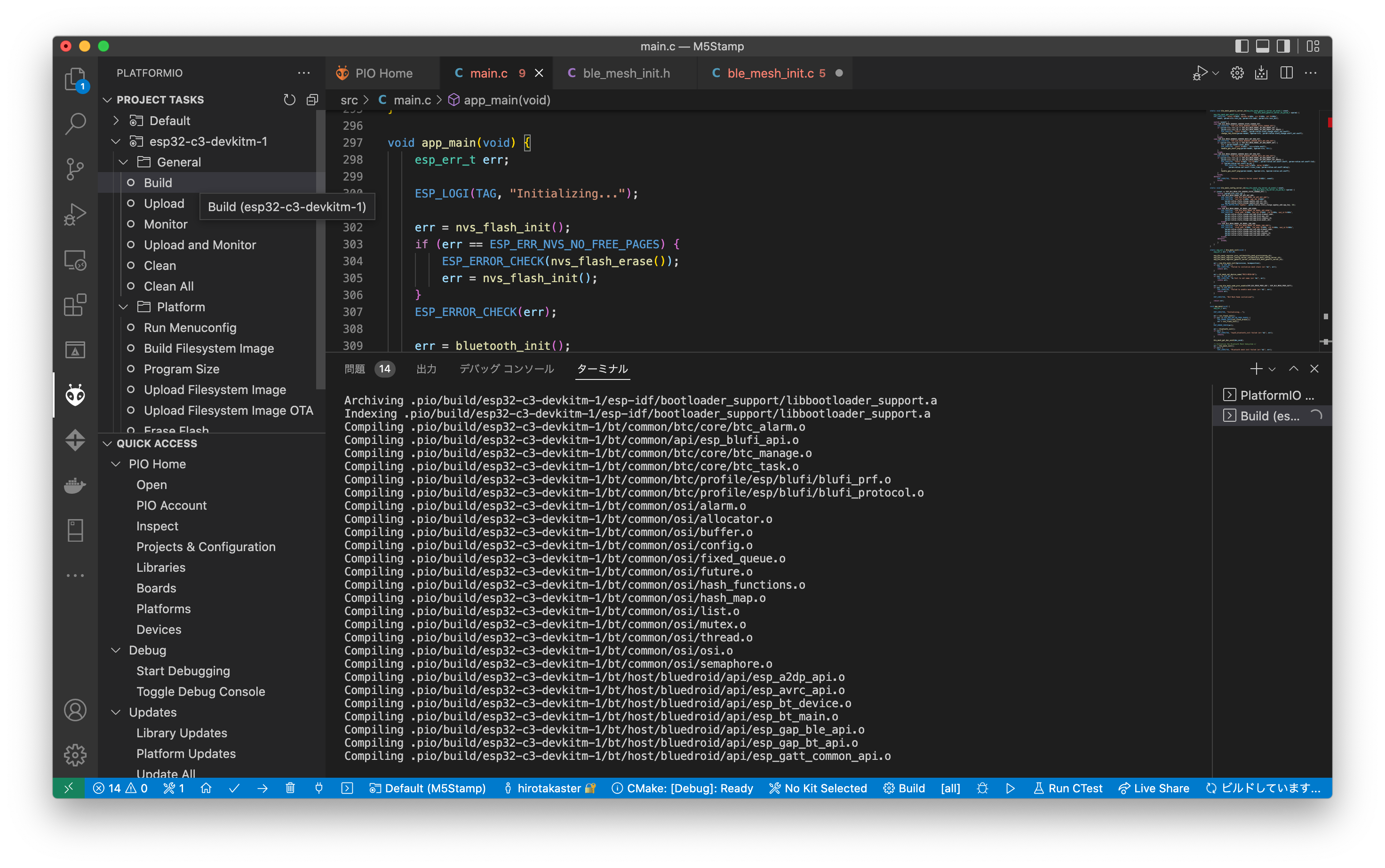
そしてビルドも同じくタスクのBuildから。esp-idfの環境を自分で作らなくてもPIO上がよろしくやってくれる。特にWindows環境下なら、VScode/PlatformIOの方がESP-IDFの環境を整備するのが、めちゃくちゃ簡単になると思う。 esp-idf直接の場合もVScodeを使うとは思うのだけど、要は自前で環境を用意する or PlatformIOに自動でやってもらう(ビルドも) という違いになる。