I made the LED Fretless guitar for just my fun, but I want to MAKE something custom reconstruction . Now, here is my fretless guitar spec – stratocaster type led guitar – MCU : Particle Argon/XENON – LED : WS2812Bx10 – Sensor : MPU-6050
I thought automatic picking guitar application is funny idea, so I tried to make the picking machine with my solenoid. Then I removed the ham pickup and manufactured the aluminum plate into an L shape, fixed it with solenoid, and embedded it in the guitar body.
Hm…subtle…verrrry subtle. And it’s need to think about the solenoid power supply, I thought that adding battery into guitar is ugly. And I remembered Paul Gilbert’s guitar playing.
Yes!! Drill!! Play the guitar using the drill(pick attached to the tip of the drill) is great idea. Paul Gilbert, you are so great!! He made the how to use the drill with guitar!!
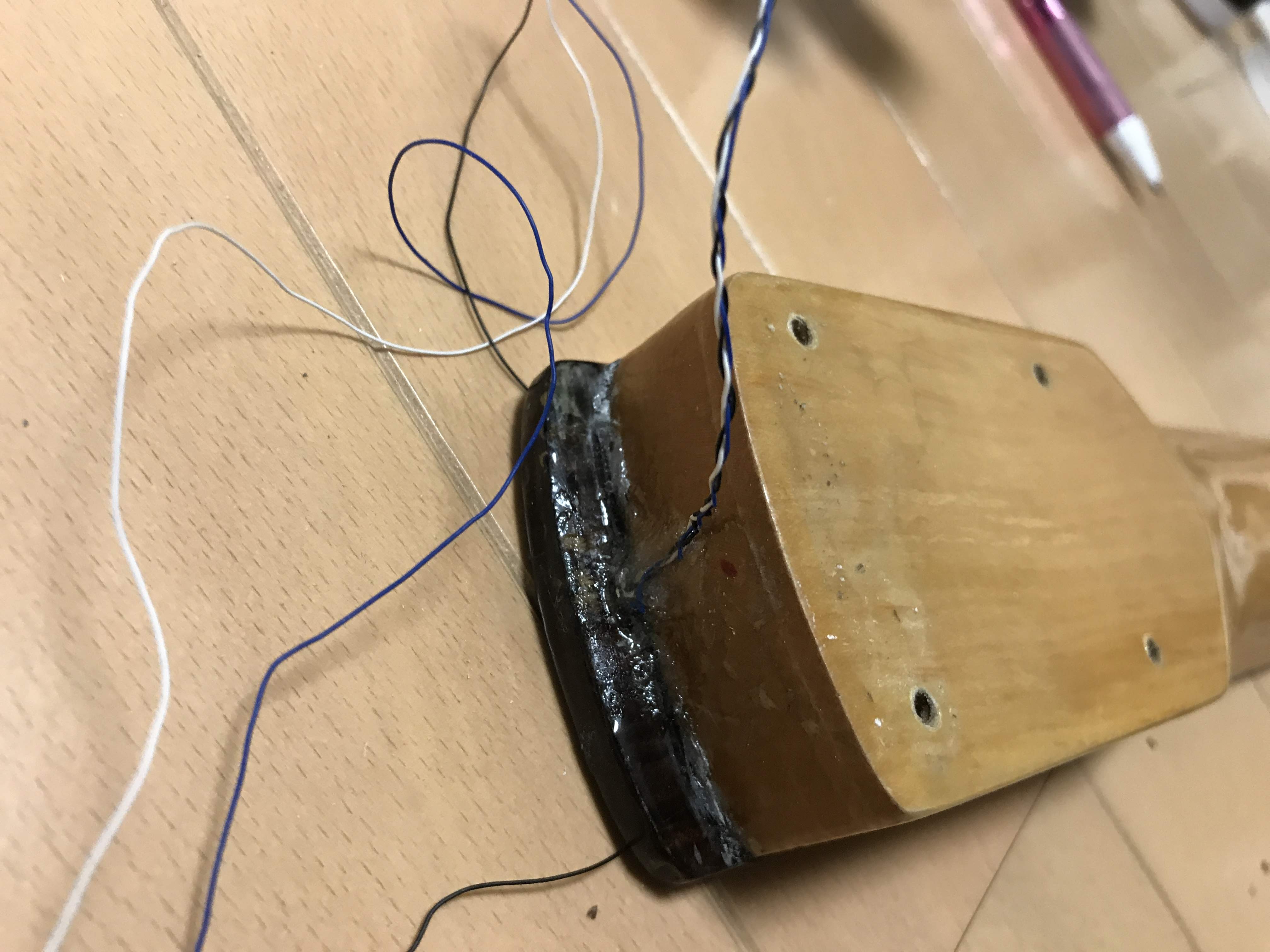
And I decided to include the motor with pick to the guitar. Then I removed the front ham pickup and I manufactured the aluminum plate into an L shape, fixed it both sides of the motor. Guitar pick fixed to the motor axis.
Here is new guitar spec, – stratocaster type led guitar – MCU : Particle XENON – LED : WS2812Bx10 – Sensor : MPU-6050 – Motor : FA-130R – Motor Driver : TB6612FNG Dual Motor Driver
2 motors connect to motor driver through backside of pickup, motor driver include to space of the volume toggle. Motor pick machine attack to 1, 2, 5, 6 strings. The bass sound and treble is easy to play fast with motor power. Drill motor start up with button on the pick guard it have a two mode. Picking while the pressing the button mode and picking for fixed time mode. First of all, let’s play.
And when the button is pressed and drill is working, the LED will set to rainbow color. I think this guitar have a two playing pattern. 1. Pressed the button with one hand(right-side), other hand(left-side) play the strings. 2. Press the button just a one time motor work fixed time, while that time play the guitar normally(very fast picking with drill). Adjust the strings height, it play with the drill working where you pressed the strings.
This guitar could play everybody!!
Maker Faire Bay Area 2019.Maker Faire Bay Area 2019.My playing at NT Kanazawa
This guitar can use Bluetooth/6LoWPAN with XEON, LED and Drill can work from internet or other PC, cell phone. Yes, this guitar have a remote play mode.
Fret-less guitar original sound, fast playing the guitar with drill are this guitar special set. I will use this guitar for one fo the sound make.
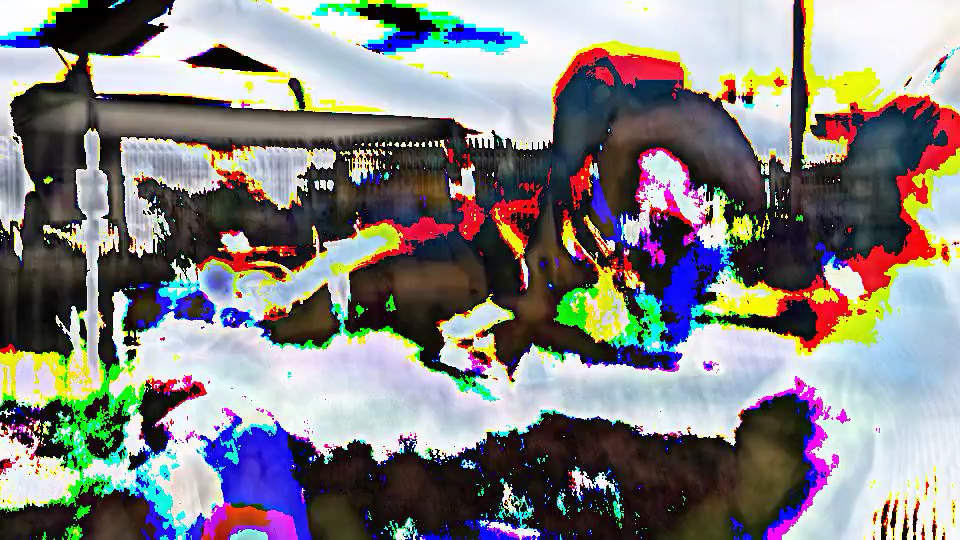
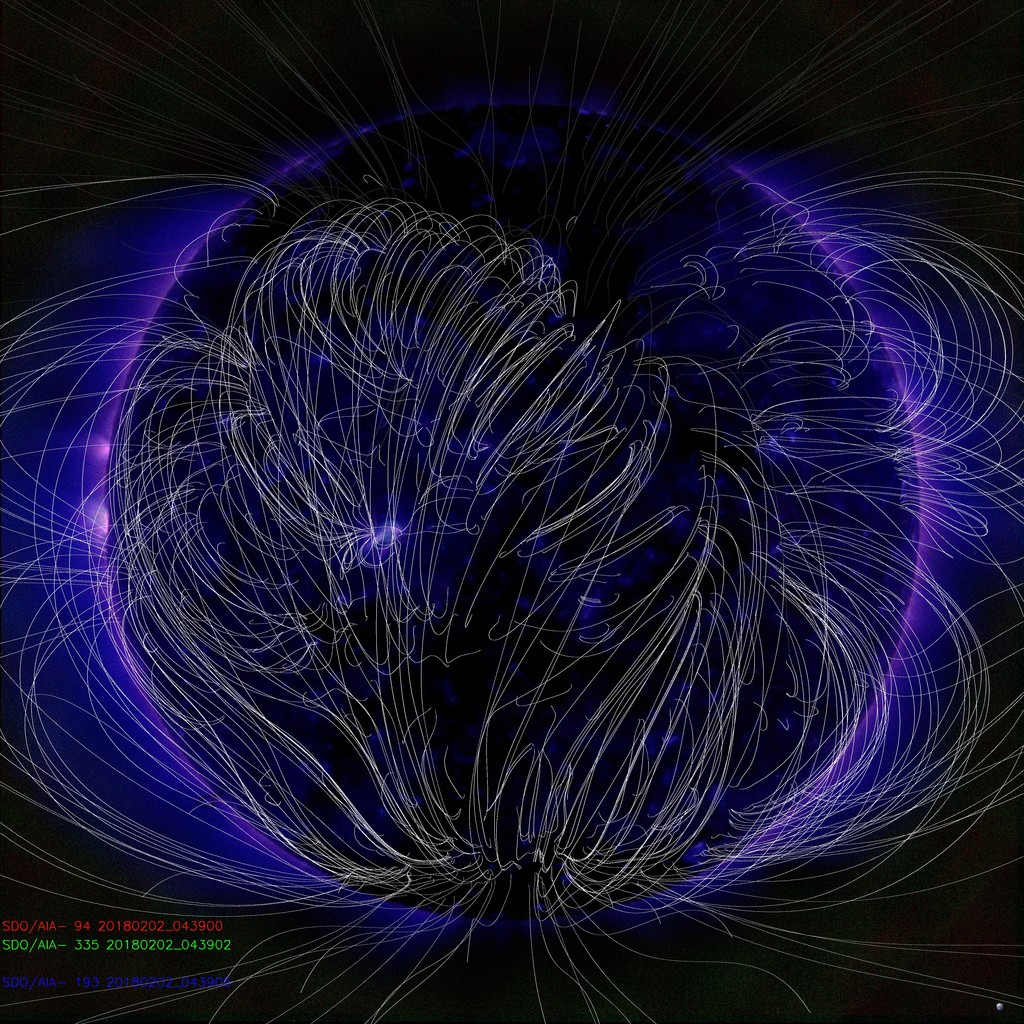
最近、機械学習でsciket-learnを色々と使っていたりで、なんとなく動画をPCA次元削減して遊んでみた。元々はPCAを行ったあとにk-meansでカテゴライズをしたりする時に使ったりする訳だけど、画像を次元削減して見てみると面白いフィルターとして使えそうな。 動画は元々はMaker Faire Bay Areaで撮った1920×1080のmp4ファイルをJPEGで取り出して、ちょっと大きいから半分にサイズを減らした後、10(右下), 60(左下), 120(右上), 240(左上)次元削減している。次元が少ない方が面白い感じに。動画から切り出した写真で10・240次元削減した物はこんな感じになる。
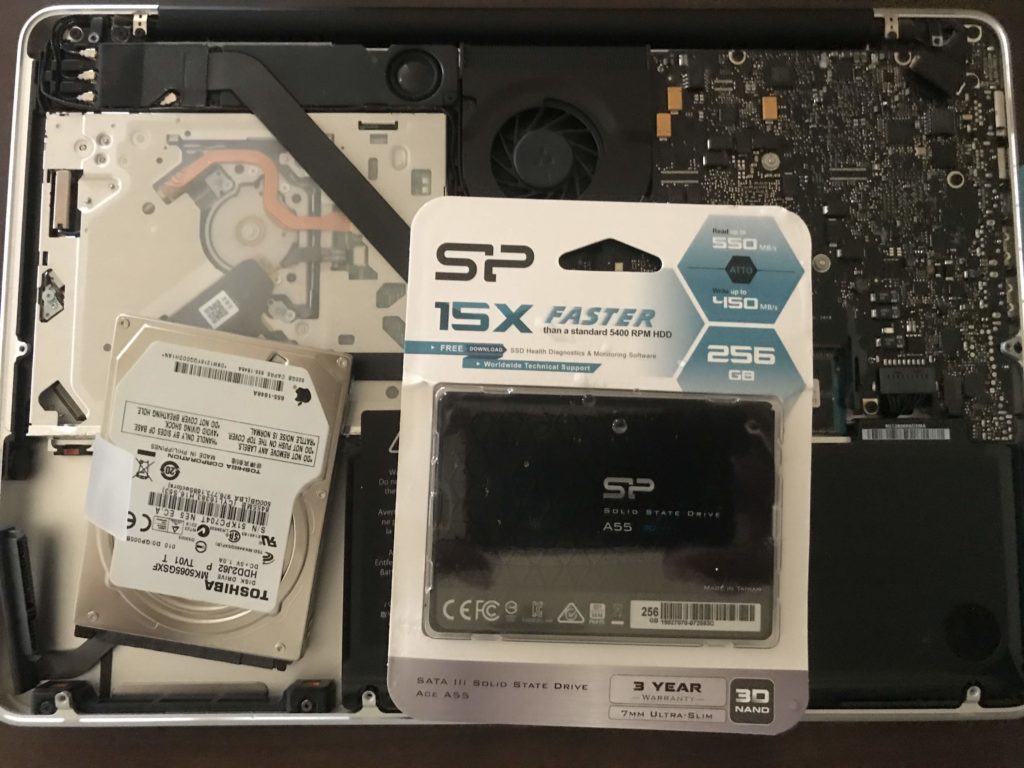
・ギターのクラフトマン凄い。自分は”とりあえずやってみた”だけど、こんな自分の作業の比較じゃないほど凄い質と量をこなしているクラフトマン、マジで凄いというのを実感した。 ・フレットを外す時にナットも一緒に外して作業すれば良かった。何で外さなかったのか… ・ヘッドのロゴの所に思わずMaker Faire Bay Areaで貰ったステッカーを張ってみた。 ・弦高調整で指板をヤスリかけて、エポキシを磨いて調整したけど、ハンドサンダーを最初に使って荒く磨いた方が楽だった。手でやるのマジで辛かった。ただ感覚的な所で、最後は手で磨くことになると思われ。 ・ギターのネックにLEDの他にも静電容量センサでも仕込んで、弦無しで指板上を触れると音が鳴る、とかも面白いと思ったり。 ・他にもセンサーを付けたり、内部にエフェクタ機能を入れても面白そう。ネックのLED化と外部電源無しに単体で遊べるから、音をいじったりもしたい感じ。
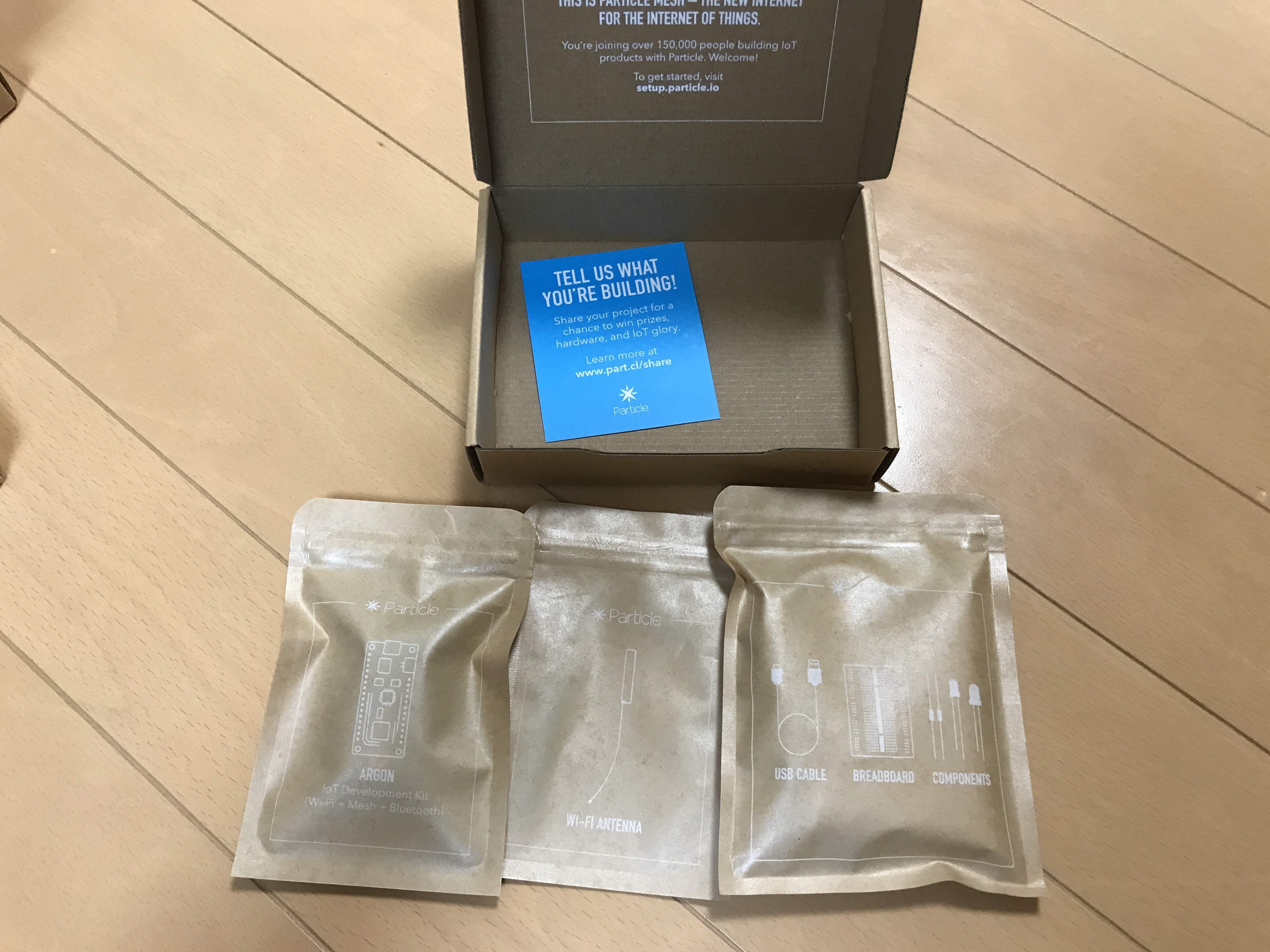
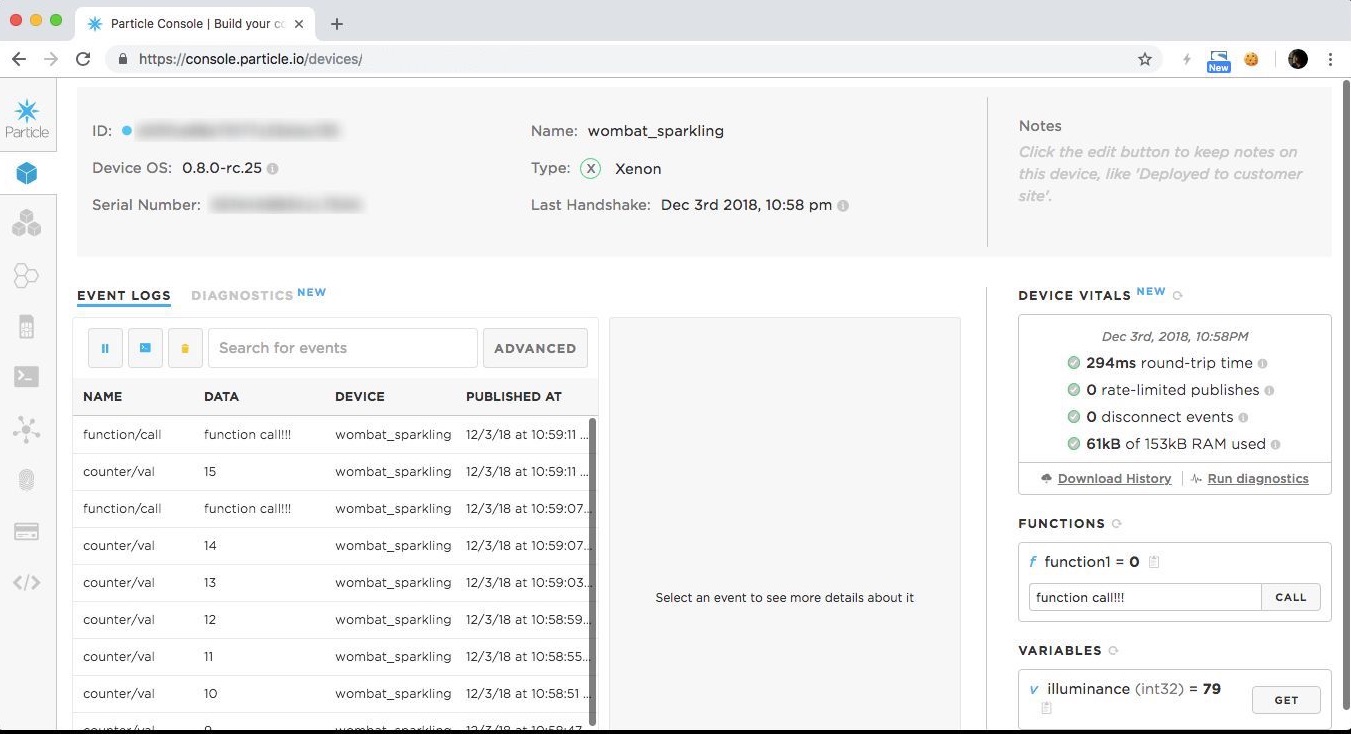
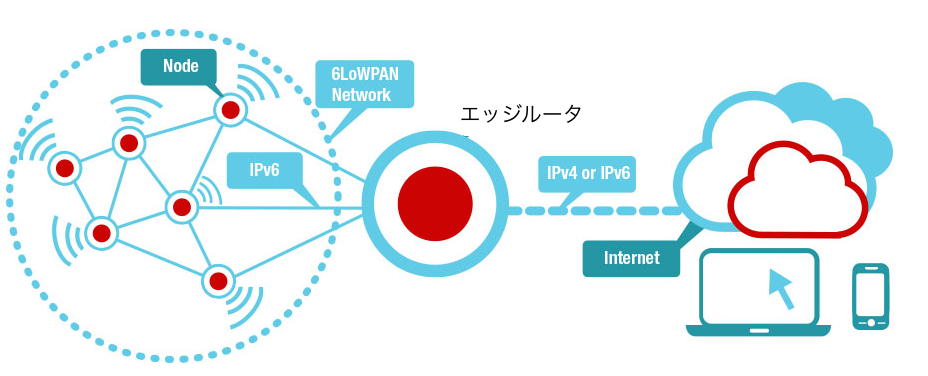
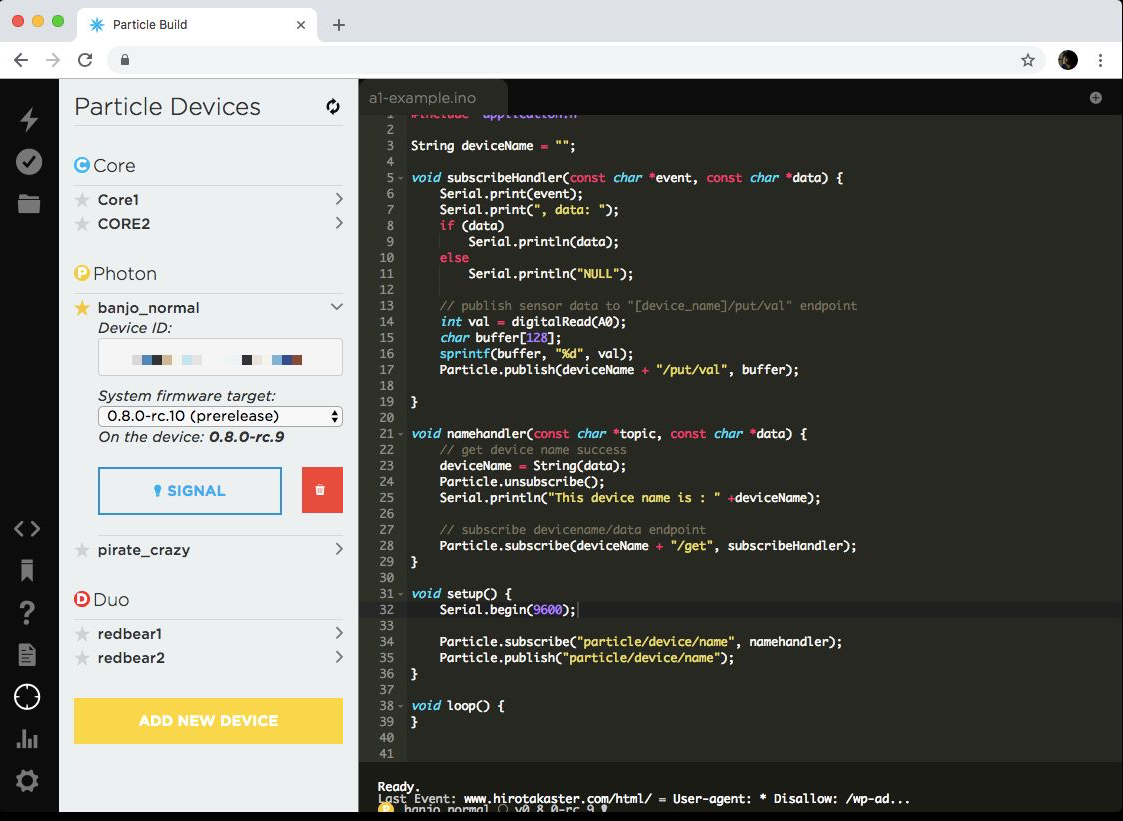
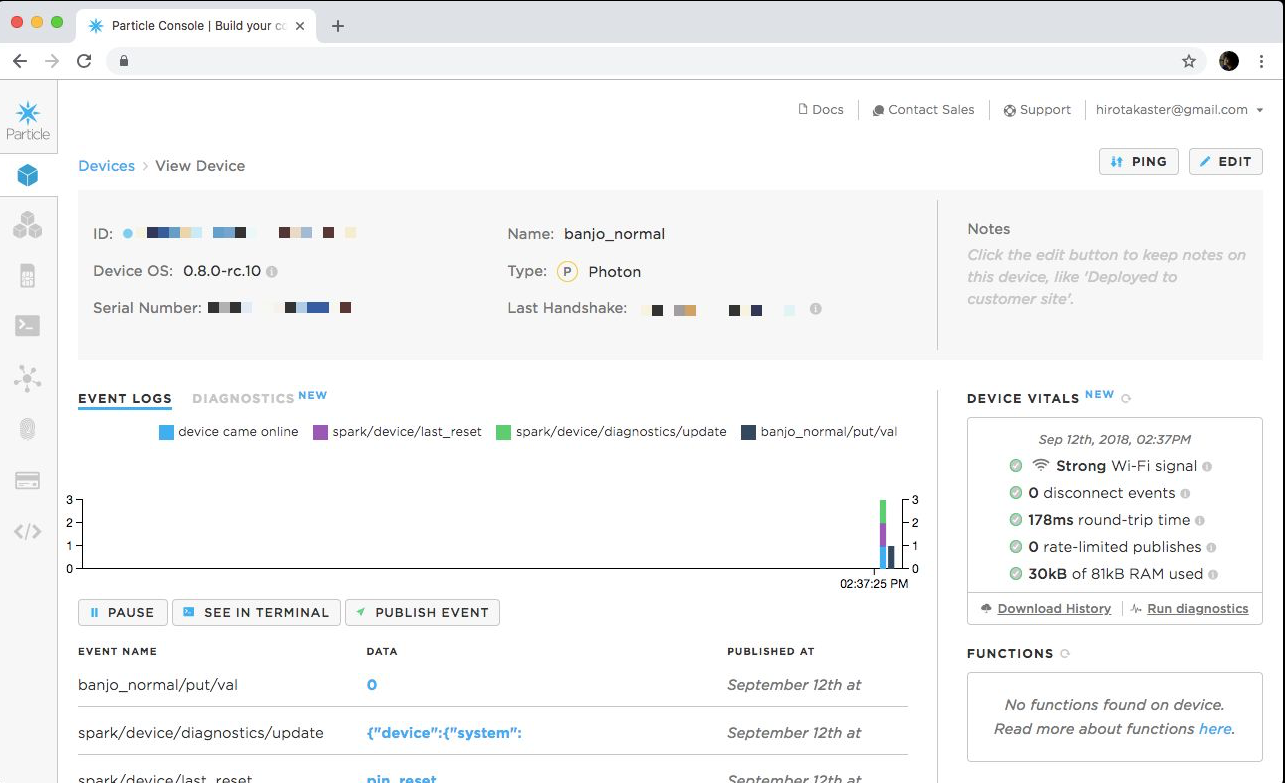
■ クラウドからアクセス
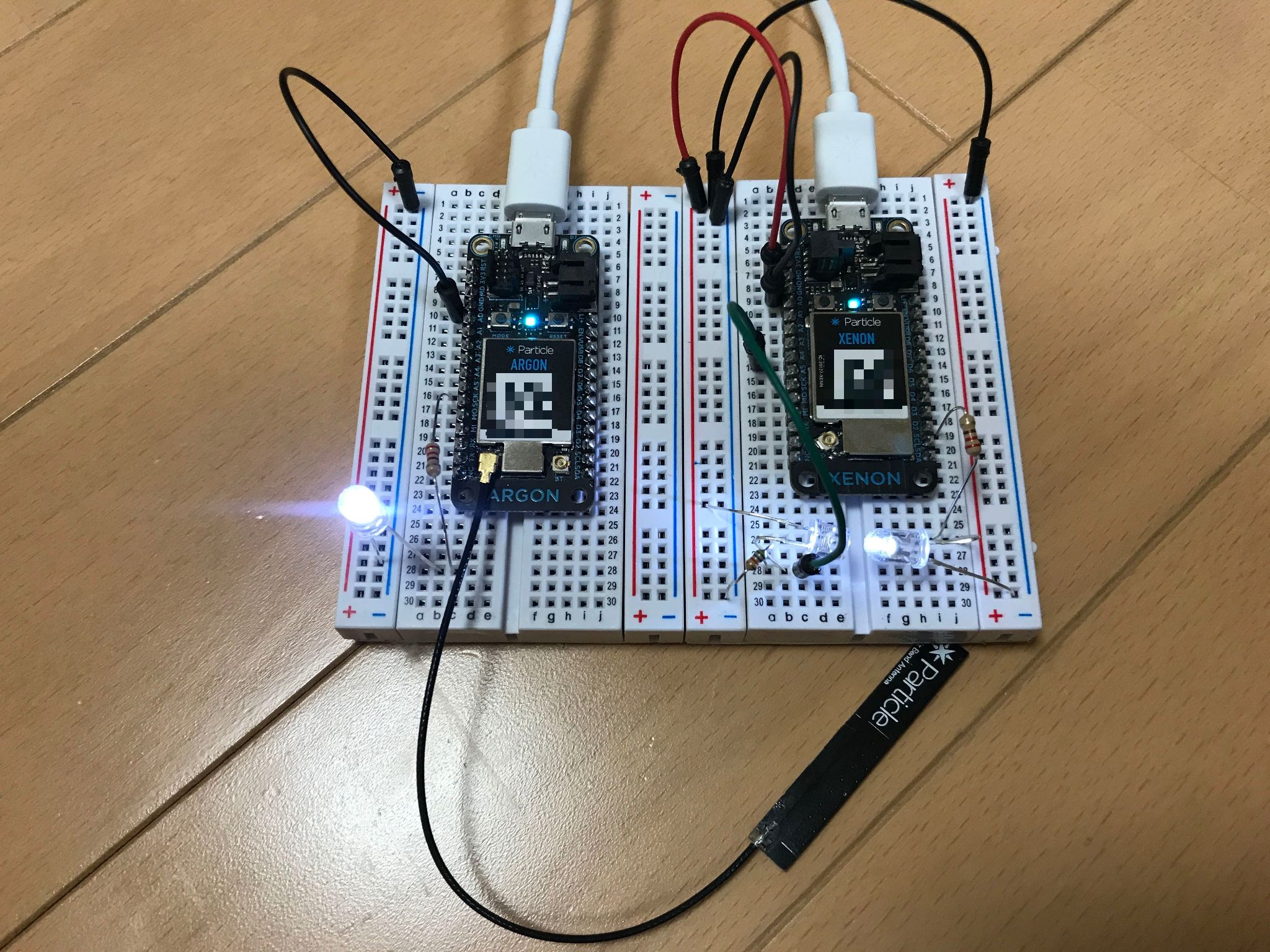
左がArgon(WiFiノード)で、右がXenon(Threadノード)でLEDと付属の照度センサをつけた。
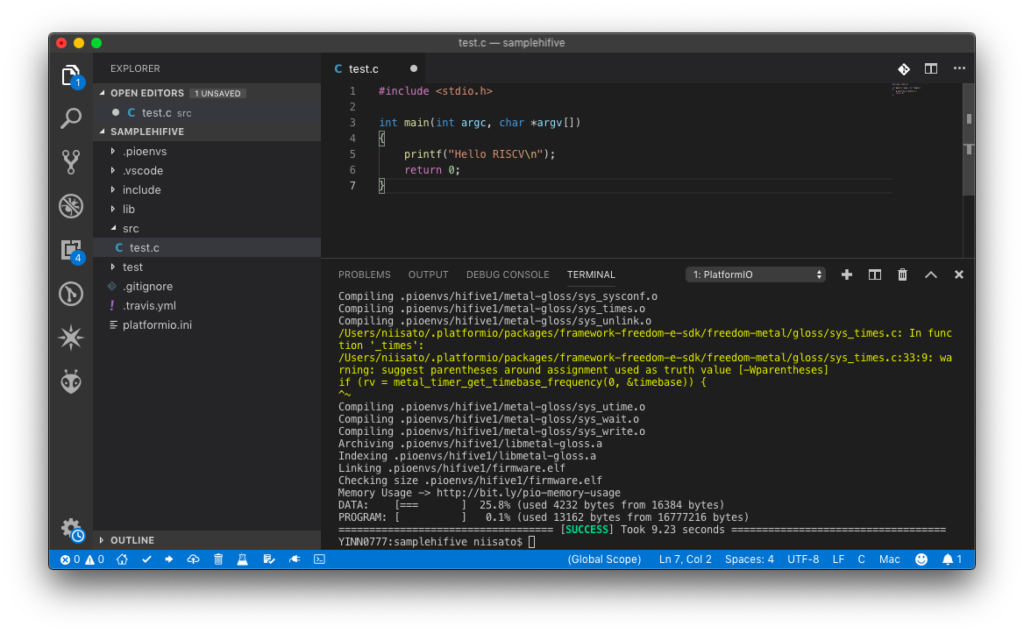
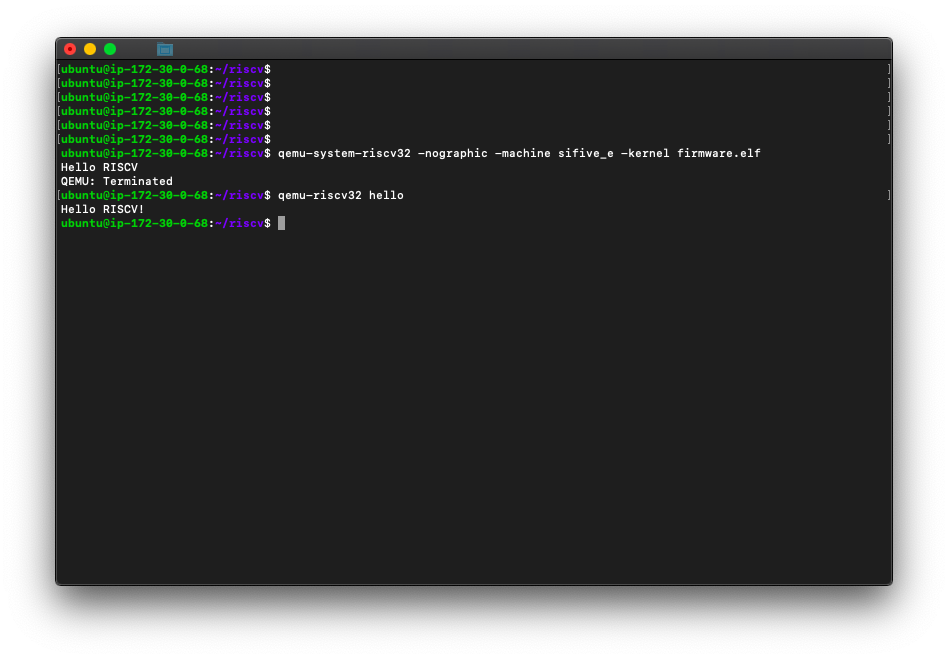
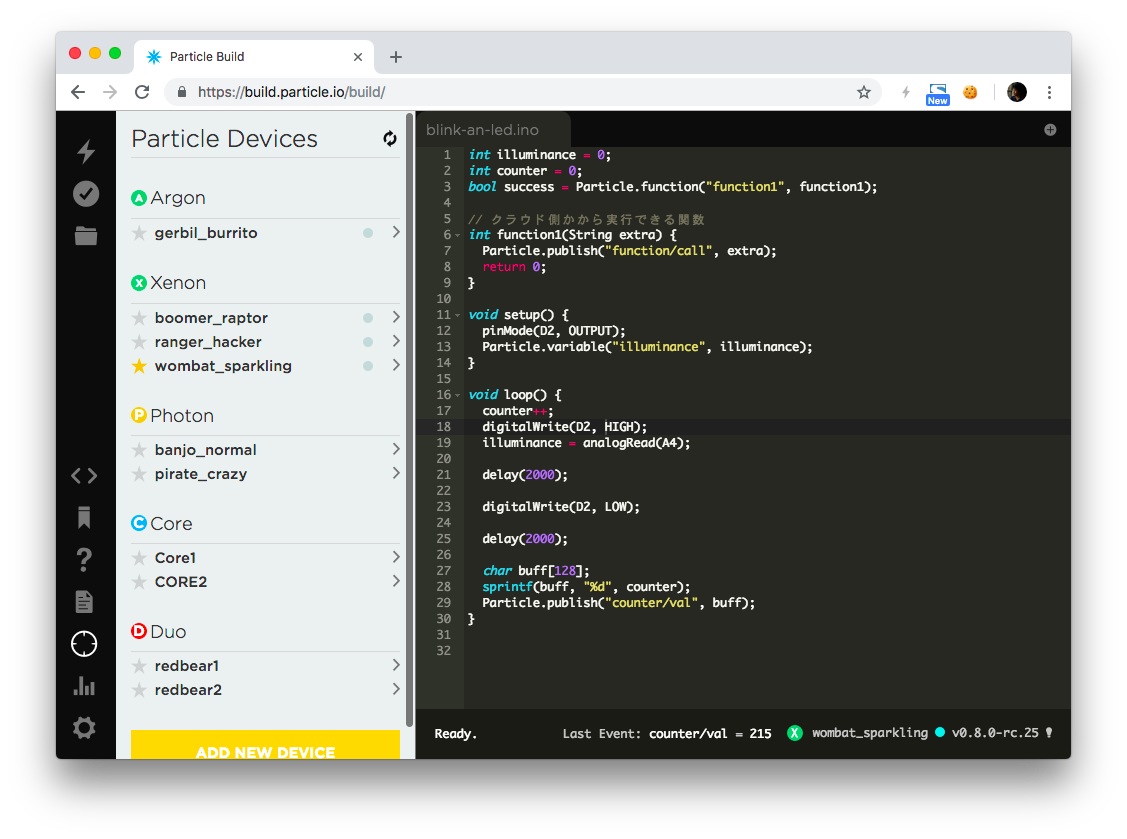
ちなみにFirmware(アプリ)はWebIDEからOTAで投入できる。クラウド(firmwareのコンパイル&ビルド)=>Internet=>WiFiノード=>Threadノード、といった感じでどこまでもOTAでアプリを投入できる&めちゃ簡単。USB SerialからもデスクトップのIDEでアプリをブチ込めるけど、ブラウザで適当にビルドして投入できるお手軽感が良い。これはCore/Photonから続く流れなんだけど、Thread/6LoWPANを経由してもOTAでfirmwareをブチ込めるのにはわりと感動する。Maker Faire Bay Areaでデモを見せて貰ったとき、本当にThread経由でOTA出来るのかよ!?と全く信じていなかったけど、マジで普通に出来る。いままでのParticleだと、初期ロットはクソみたいな出来栄えで、まともに動くと全く思っていなかっただけに、ビックリしてしまった。
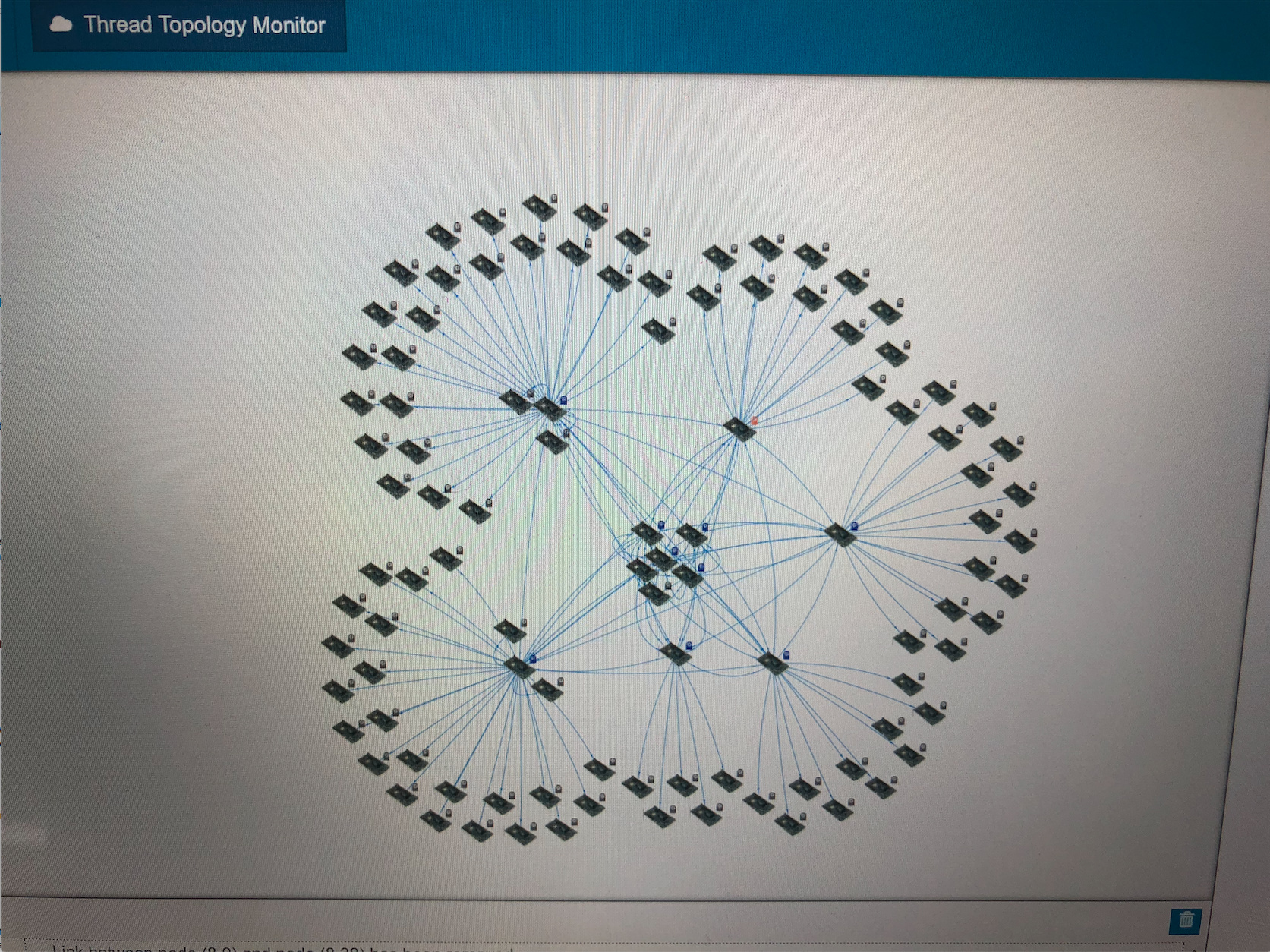
コミュニティに上がっている最新情報で、実際に動いているネットワークのトポロジなんかを見るとわりと感動するものがある。国内で使えるよう、どこか持ってきてくれないかしら…まぁ、自分は10個ほどプレオーダーしちゃってるんだけどね。どうせ、またメンテしないといけないし(白目)。 this pic from Particle community site.