LightBlue Beanが先週届いて、少し触って放置していたけど…ちょっとメモで書いておく。LightBlue Bean は確か去年だったか(忘れた)、KickStarterだったかプレオーダーで予約をしたのが4個来ていた。今、オーダーページを見てみたら$30(1個だけ)、$28.5(4個)でプレオダー出来るみたい。
この子のスペックは次のような感じ。
MCU : Atmel ATmega328P @ 8MHz with 32KB Flash, 1KB EEPROM, 2KB SRAM
Bluetooth : LBM313 Module with Texas Instruments CC2540, 256 KB Flash. Bluetooth range: 30.5m. Power consumption in sleep mode: 0.9μA. BLE compatible.
I/O : 4 PWM pins, 2 Analog inputs, 8 GPIO, I2C and SPI
Sensor: 3軸加速度センサ、温度センサ
その他:フルカラーLED
面白いのが箱にコイン電池付きで発送されてきて、AppStoreからiPhoneのアプリをダウンロードして、すぐBTで接続&動作確認が出来るというお手軽さ。
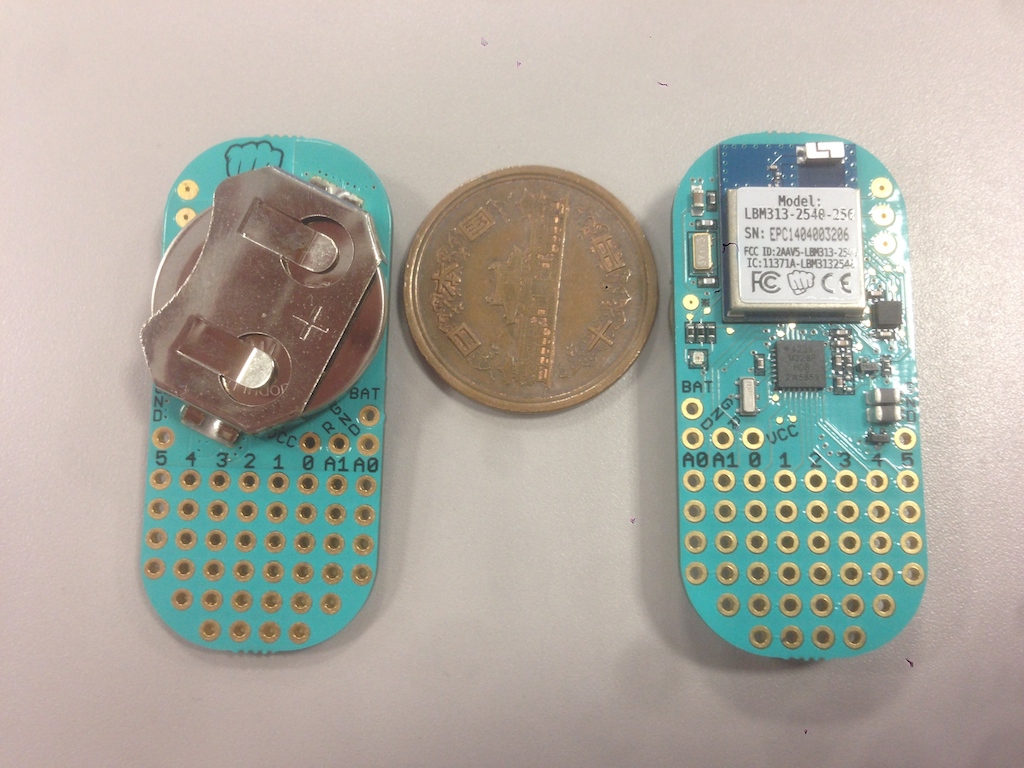
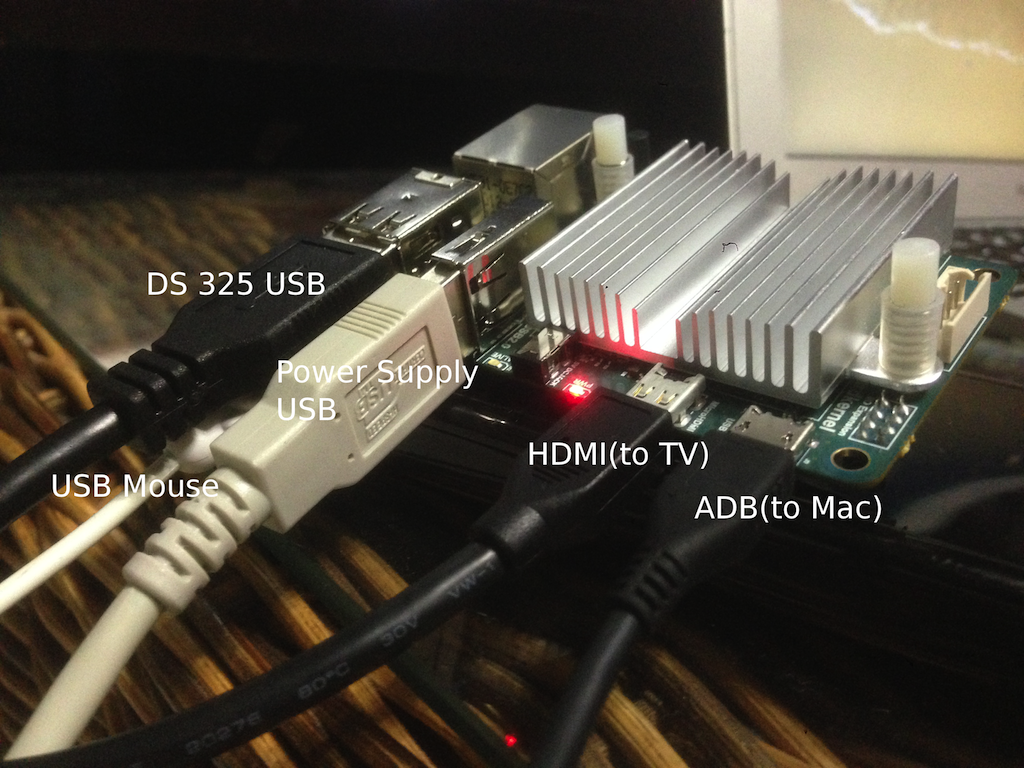
実際のサイズはこんな感じ。かなり小さい。温度センサは最初はスペックに無かったはずだけど、追加で付いたのかしら。実験してみたら、バッチリ温度が取れた。コイン電池でこのスペックは割と良い感じだと思う。接続は次のような感じ。
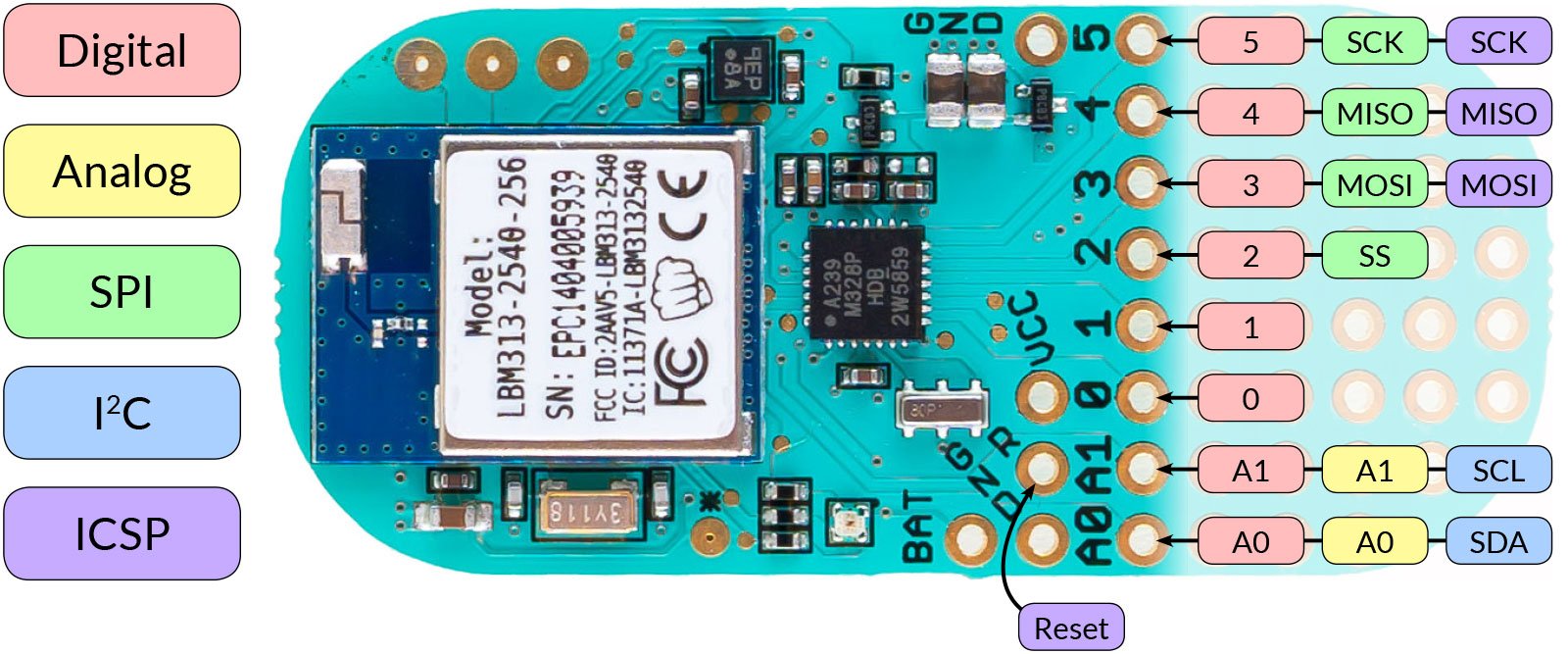
Analogが2個しか使えないけど、まぁ良いかって感じ。このピンの2列目以下はただのユニバーサル基盤のようなもんで、パキっと折っちゃえば更に小さく使える。
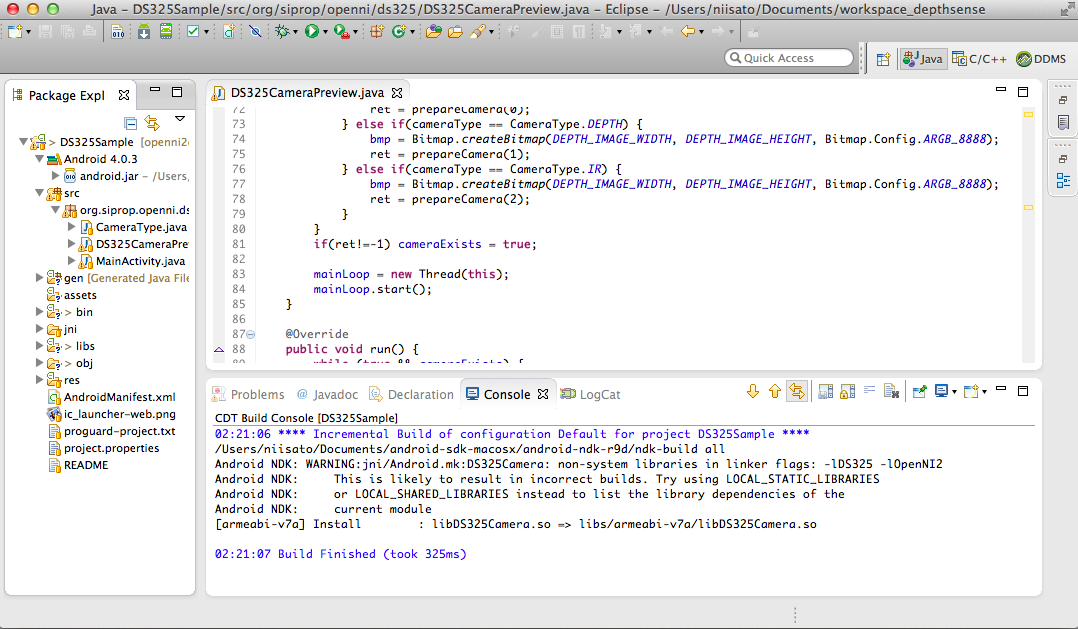
iPhoneにアプリを入れて接続するとこんな感じで見える。
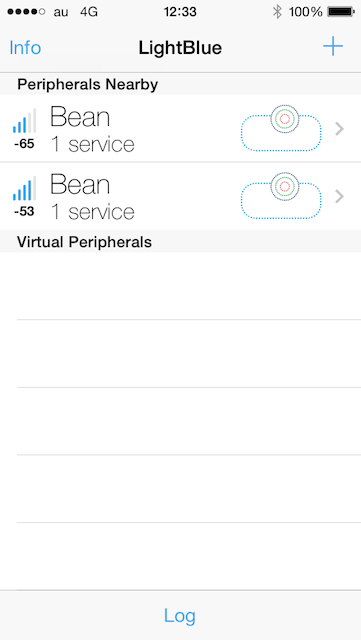
IOをいじったり、色を変えたり加速度センサの値をモニタリングとか。

そして、ArduinoのIDEから直接使える。使い方はこちら。Macで5分もあれば設定&すぐプログラム出来た。他にもiOS/OSX向けのSDK&ソースもgithubで公開していた。リファレンスを見ただけだけど、BTでのスキャン・接続・センサの値を取得するAPI…etcとかが使えるみたい。あと、まだWin/Android向けは無いけど、Win向けは絶賛開発中とのこと。開発スケジュールはアップされていた。
加速度センサでLEDが変わるArduinoのプログラム(exampleにある)のはこんな感じ。
void setup() {
// initialize serial communication at 57600 bits per second:
Serial.begin(57600);
}
// the loop routine runs over and over again forever:
void loop() {
AccelerationReading accel = {0, 0, 0};
accel = Bean.getAcceleration();
uint16_t r = (abs(accel.xAxis)) / 4;
uint16_t g = (abs(accel.yAxis)) / 4;
uint16_t b = (abs(accel.zAxis)) / 4;
Bean.setLed((uint8_t)r,(uint8_t)g,(uint8_t)b);
Bean.sleep(50);
}
あとはサンプルで、光センサを付けて光ったら音が鳴るテルミンなる物とかもプログラムと一緒に紹介してあったり、とりあえずゲットしたらすぐ遊べる感じ。値段($30-28.5)とBLE/3軸加速度/温度センサ、Arduino IDEでのプログラム環境を考えるとアリと思われ。
若干アレなのが…もし大量に使う場合、プログラムの流し込みがBT経由になるからちょっと大変かもね…って所くらいかな。数個くらいなら、USBケーブル使わないで使えるし全然アリ。