SIProp.org develop OpenNI2 DS325(DepthSense) driver for Android and Arm Linux. There is no choice to use DepthSense 3D ToF sensor camera in embedded device(Arm, Android…), because of PrimeSense Xtion is discontinued and will be hard to get. Here is “How to build OpenNI2 DS325 driver for Android and Arm Linux Raspberry Pi”.
1. Android Build
# Build OpenNI2 DS325 Driver for Android wget http://dl.google.com/android/ndk/android-ndk-r8e-darwin-x86_64.tar.bz2 tar -jxvf android-ndk-r8e-darwin-x86_64.tar.bz2 cd android-ndk-r8e export NDK_ROOT=$PWD export PATH=$PATH:$PWD cd .. git clone https://github.com/SIProp/openni2ds325.git cd openni2ds325/Packaging/ python ReleaseVersion.py android # copy all shared libraries and ini file to Android cd OpenNI-android-2.2 ./adb push libusb.so /system/lib/ ./adb push libOpenNI2.so /system/lib/ ./adb push libOniFile.so /system/lib/ ./adb push libDS325.so /system/lib/ ./adb push libPSLink.so /system/lib/ ./adb push libPS1080.so /system/lib/ ./adb push OpenNI.ini /system/lib/ ./adb push PS1080.ini /system/lib/ ./adb push DS325.ini /system/lib/ ./adb push SimpleRead /system/lib/ # Sample Application Build cd openni2ds325/Samples/DS325Sample/jni/ ndk-build
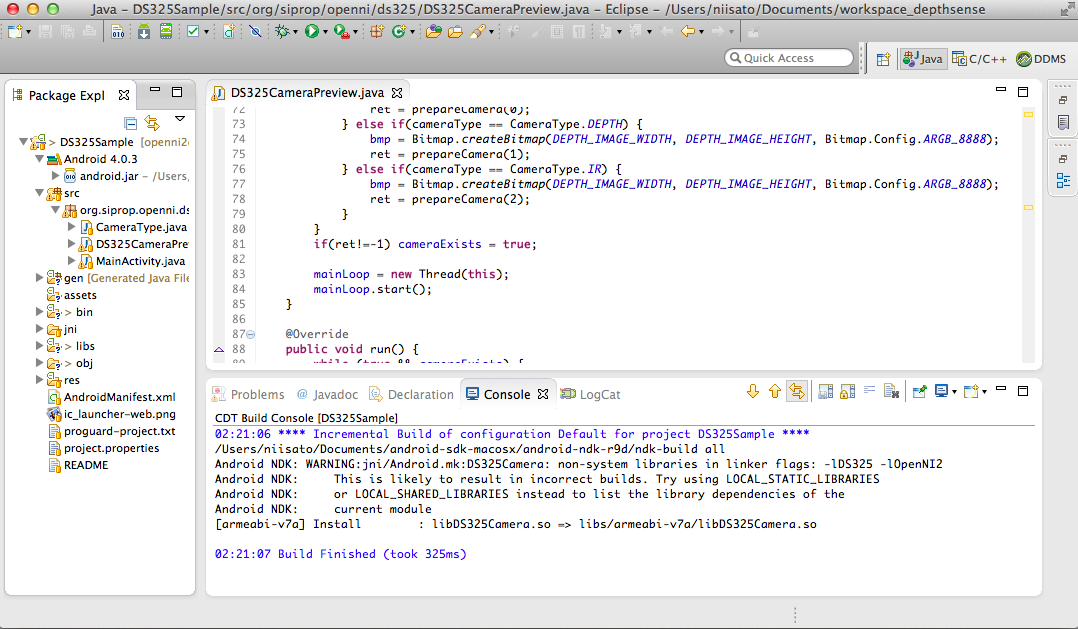
# import DS325Sample Project on Eclipse and Run.
2. ARM Raspberry Pi
sudo apt-get update
sudo apt-get install g++ python libusb-1.0-0-dev freeglut3-dev \
doxygen graphviz openjdk-6-jdk libudev-dev
git clone https://github.com/SIProp/openni2ds325.git
# edit "ThirdParty/PSCommon/BuildSystem/Platform.Arm" file
------------------------------------------------
# change CFLAGS option.
CFLAGS += -march=armv7-a -mtune=cortex-a9 -mfpu=neon -mfloat-abi=softfp #-mcpu=cortex-a8
to
CFLAGS += -mtune=arm1176jzf-s -mfpu=vfp -mfloat-abi=hard
# disable NEON option
DEFINES += XN_NEON
to
#DEFINES += XN_NEON
------------------------------------------------
# build OpenNI2
cd openni2ds325/Packaging
python ReleaseVersion.py Arm
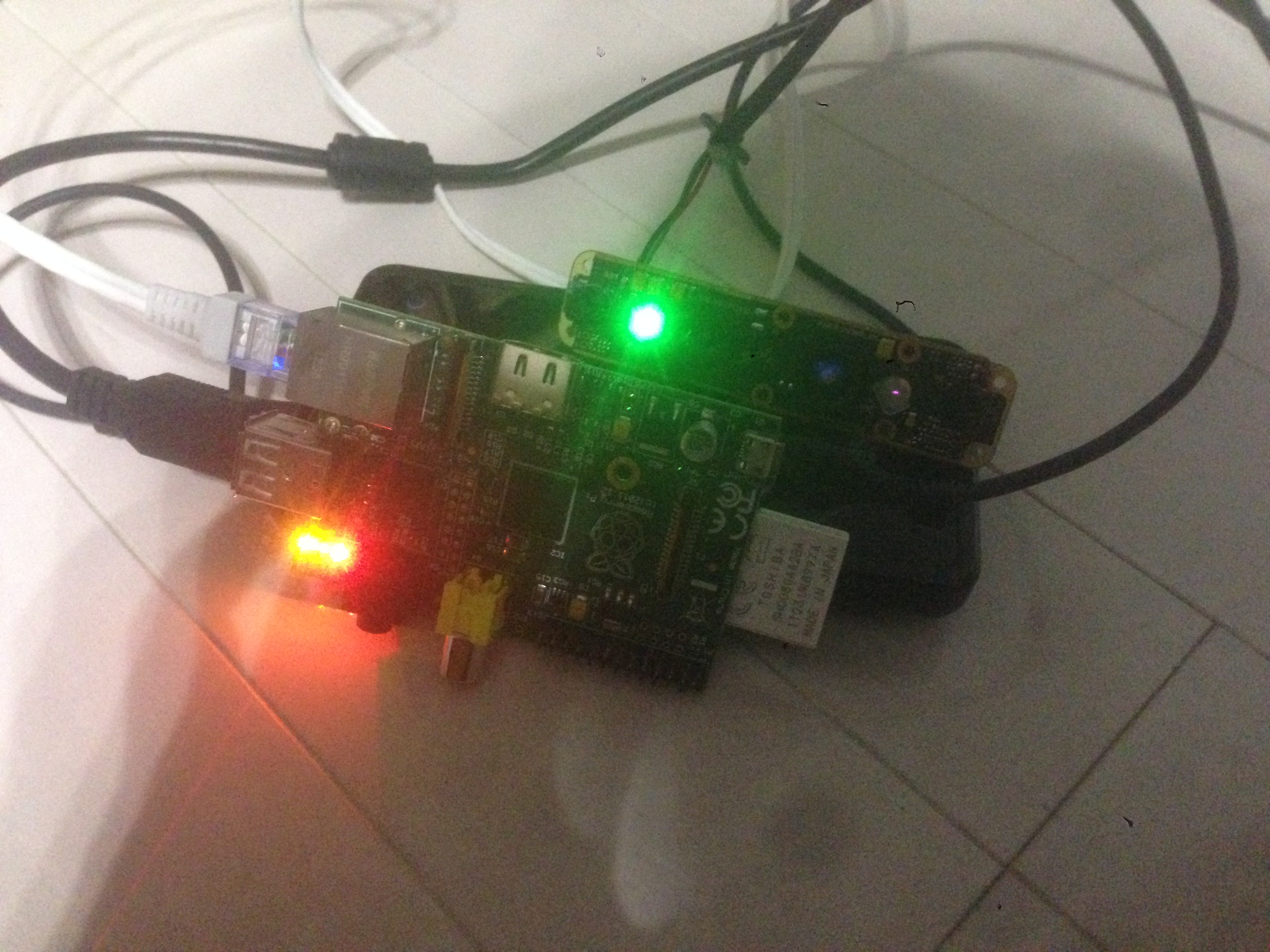
# Run and check DS325
cd OpenNI-Linux-Arm-2.2/Samples/Bin
./SimpleRead
I am try to test the DS325 on Arm Linux device, however I cannot build the driver with the following error:
Creating installer for OpenNI 2.2 Arm
Traceback (most recent call last):
File “ReleaseVersion.py”, line 167, in
subprocess.check_call([‘make’, ‘-C’, ‘../’, ‘-j’ + calc_jobs_number(), ‘PLATFORM=’ + plat, ‘clean’], stdout=devNull, stderr=devNull)
File “/usr/lib/python2.7/subprocess.py”, line 540, in check_call
raise CalledProcessError(retcode, cmd)
subprocess.CalledProcessError: Command ‘[‘make’, ‘-C’, ‘../’, ‘-j2’, ‘PLATFORM=Arm’, ‘clean’]’ returned non-zero exit status 2
# You need to install make. #
$ sudo apt-get install make
# then run the python installer #
$ python ReleaseVersion.py Arm
Already installed make but still have same problem
Hi, you need to edit the make file
(./ThirdParty/PSCommon/BuildSystem/Platform.Arm)
and remove the -Wno-error=unused-local-typedefs
it should look like this:
ifneq “$(ALLOW_WARNINGS)” “1”
CFLAGS += -Werror
endif
I’ve donde every step corretly but at the end I just get numbers and more numbers, I’d like to get the depth images or videos or even better a depth stream. Can somebody help me with that I’m new in Linux and Raspberry