環境は以下
– Windows 8.0
– VS 2012
– openFrameworks 0.8.3(x86)
まずMSのサイトからKinect SDKをダウンロードしてきてインストール。
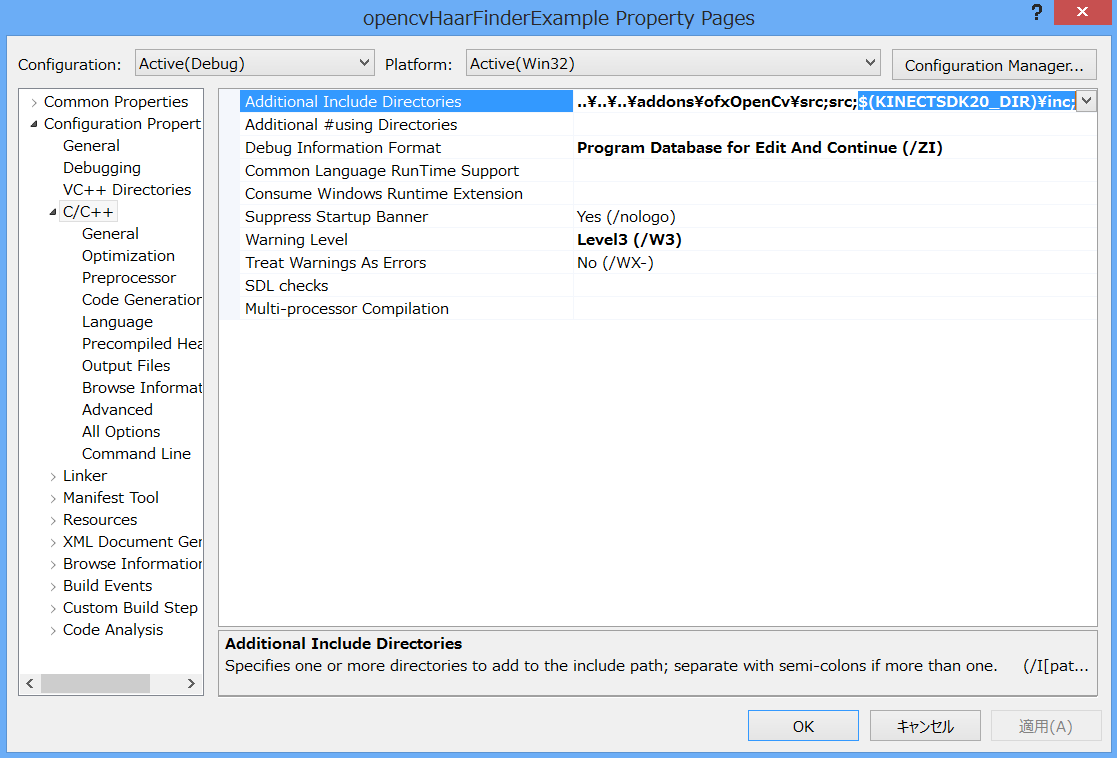
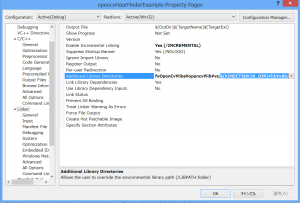
1. Includeに$(KINECTSDK20_DIR)¥inc;を追加

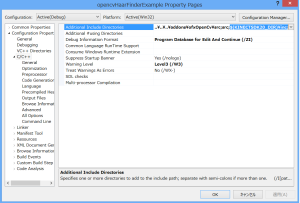
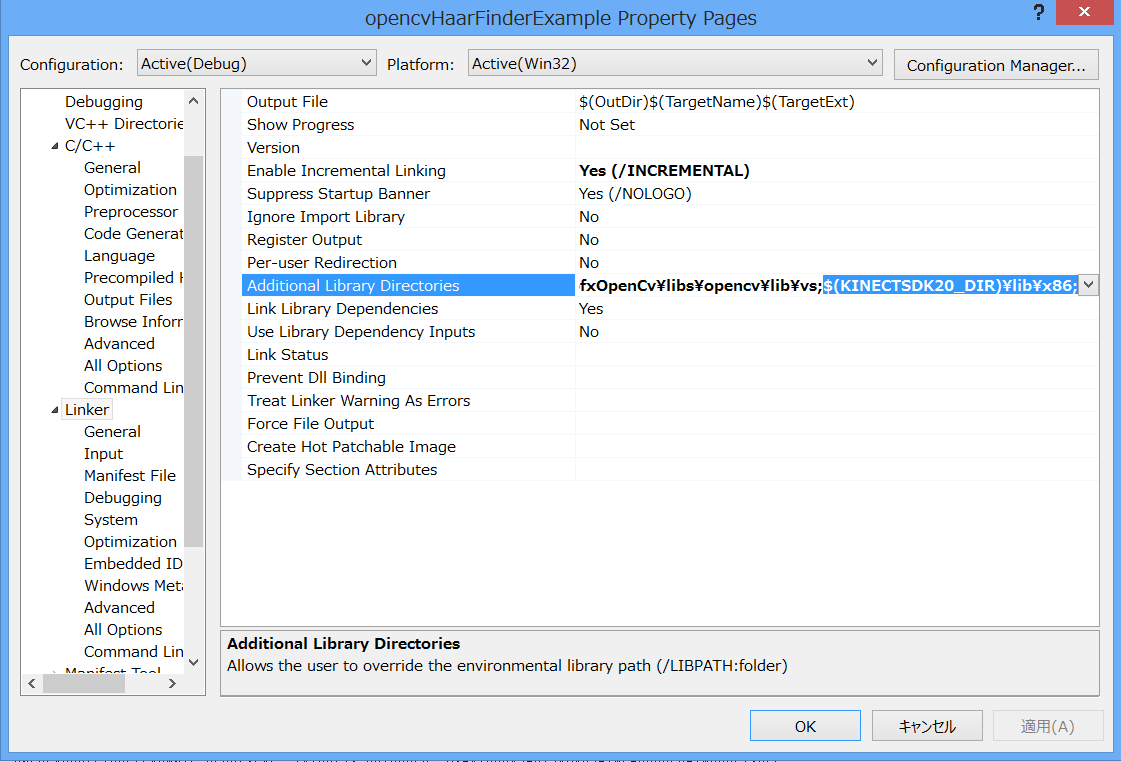
2. Libに$(KINECTSDK20_DIR)¥lib¥x86;を追加
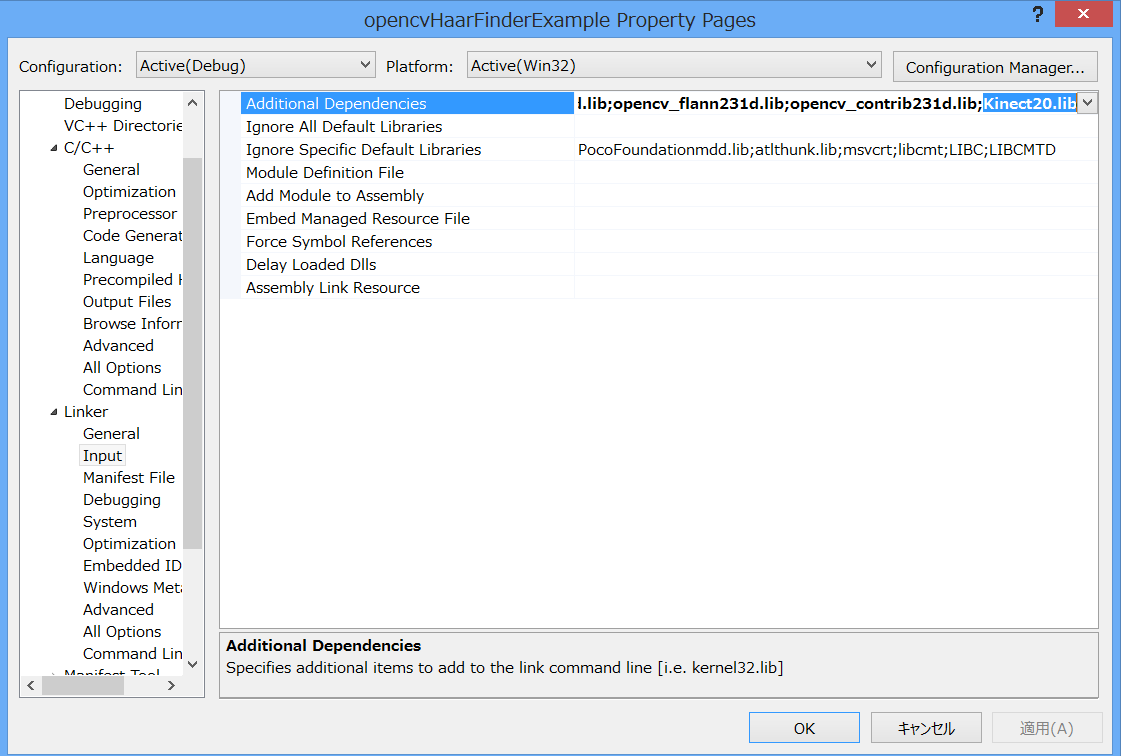
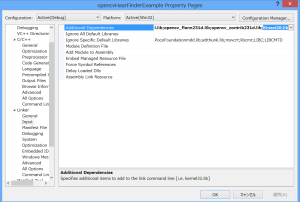
3. DependenciesにKinect20.libを追加

4. コードを書く
Kinect for Windows v2 Developer Preview入門 ― C++プログラマー向け連載をほぼコピってof向けに整形しただけですが…
ofApp.h
#pragma once
#include "ofMain.h"
#include "ofxOpenCv.h"
#include <kinect.h>
#include <Windows.h>
using namespace cv;
template
inline void SafeRelease( Interface *& pInterfaceToRelease )
{
if( pInterfaceToRelease != NULL ){
pInterfaceToRelease->Release();
pInterfaceToRelease = NULL;
}
}
class ofApp : public ofBaseApp{
public:
void setup();
void update();
void draw();
bool initializeKinectv2();
IKinectSensor* pSensor;
IDepthFrameSource* pDepthSource;
IColorFrameSource* pColorSource;
IBodyFrameSource* pBodySource;
IColorFrameReader* pColorReader;
IBodyFrameReader* pBodyReader;
IDepthFrameReader* pDepthReader;
IFrameDescription* pDepthDescription;
IFrameDescription* pColorDescription;
ICoordinateMapper* pCoordinateMapper;
// buffer
ofxCvGrayscaleImage grayscaleImage;
ofxCvColorImage colorscaleImage;
//
int depthWidth, depthHeight;
unsigned int depthBufferSize;
int colorWidth, colorHeight;
unsigned int colorBufferSize;
};
ofApp.cpp
#include "ofApp.h"
//--------------------------------------------------------------
void ofApp::setup(){
ofSetVerticalSync(true);
ofBackground(255, 255, 255);
// ofSetFullscreen(true);
ofEnableAlphaBlending();
ofEnableSmoothing();
ofSetBackgroundAuto(true);
if (!this->initializeKinectv2())
exit();
}
bool ofApp::initializeKinectv2() {
HRESULT hResult = S_OK;
// Open Kinect
hResult = GetDefaultKinectSensor( &this->pSensor );
if( FAILED( hResult ) ){
std::cerr << "Error : GetDefaultKinectSensor" << std::endl;
return false;
}
hResult = this->pSensor->Open( );
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::Open()" << std::endl;
return false;
}
// Open Source
hResult = this->pSensor->get_ColorFrameSource( &this->pColorSource );
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::get_ColorFrameSource()" << std::endl;
return false;
}
hResult = this->pSensor->get_BodyFrameSource( &this->pBodySource );
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::get_BodyFrameSource()" << std::endl;
return false;
}
hResult = pSensor->get_DepthFrameSource( &this->pDepthSource );
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::get_DepthFrameSource()" << std::endl;
return false;
}
// Open Reader
hResult = this->pColorSource->OpenReader( &this->pColorReader );
if( FAILED( hResult ) ){
std::cerr << "Error : IColorFrameSource::OpenReader()" << std::endl;
return false;
}
hResult = this->pBodySource->OpenReader( &this->pBodyReader );
if( FAILED( hResult ) ){
std::cerr << "Error : IBodyFrameSource::OpenReader()" << std::endl;
return false;
}
hResult = this->pDepthSource->OpenReader( &this->pDepthReader );
if( FAILED( hResult ) ){
std::cerr << "Error : IDepthFrameSource::OpenReader()" << std::endl;
return false;
}
// get descriptions
hResult = pDepthSource->get_FrameDescription( &this->pDepthDescription );
if( FAILED( hResult ) ){
std::cerr << "Error : IDepthFrameSource::get_FrameDescription()" << std::endl;
return false;
}
hResult = pColorSource->get_FrameDescription( &this->pColorDescription );
if( FAILED( hResult ) ){
std::cerr << "Error : IColorFrameSource::get_FrameDescription()" << std::endl;
return false;
}
// get coordinate mapper
hResult = this->pSensor->get_CoordinateMapper( &this->pCoordinateMapper );
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::get_CoordinateMapper()" << std::endl;
return false;
}
this->pDepthDescription->get_Width( &depthWidth ); // 512
this->pDepthDescription->get_Height( &depthHeight ); // 424
this->depthBufferSize = depthWidth * depthHeight * sizeof( unsigned short );
this->pColorDescription->get_Width( &colorWidth );
this->pColorDescription->get_Height( &colorHeight );
this->colorBufferSize = colorWidth * colorHeight * 4 * sizeof( unsigned char );
this->grayscaleImage.allocate(depthHeight, depthWidth);
this->colorscaleImage.allocate(colorHeight, colorWidth);
}
//--------------------------------------------------------------
void ofApp::update(){
// get depth frame
Mat bufferMat( depthHeight, depthWidth, CV_16SC1 );
Mat depthMat(depthHeight, depthWidth, CV_8UC1 );
cv::Mat colorBufferMat( colorHeight, colorWidth, CV_8UC4 );
cv::Mat colorMat( colorHeight, colorWidth, CV_8UC4 );
// Frame
IDepthFrame* pDepthFrame = nullptr;
HRESULT hResult = pDepthReader->AcquireLatestFrame( &pDepthFrame );
if(SUCCEEDED( hResult )){
hResult = pDepthFrame->AccessUnderlyingBuffer( &depthBufferSize, reinterpret_cast<UINT16**>( &bufferMat.data ) );
if( SUCCEEDED( hResult ) ){
bufferMat.convertTo(depthMat, CV_8U, -255.0f / 4500.0f, 255.0f);
grayscaleImage.setFromPixels(depthMat.data, depthWidth, depthHeight);
}
}
SafeRelease( pDepthFrame );
// get color frame
cv::Vec3b color[6];
color[0] = cv::Vec3b( 255, 0, 0 );
color[1] = cv::Vec3b( 0, 255, 0 );
color[2] = cv::Vec3b( 0, 0, 255 );
color[3] = cv::Vec3b( 255, 255, 0 );
color[4] = cv::Vec3b( 255, 0, 255 );
color[5] = cv::Vec3b( 0, 255, 255 );
IColorFrame* pColorFrame = nullptr;
hResult = pColorReader->AcquireLatestFrame( &pColorFrame );
if( SUCCEEDED( hResult ) ){
hResult = pColorFrame->CopyConvertedFrameDataToArray( colorBufferSize, reinterpret_cast<BYTE*>( colorBufferMat.data ), ColorImageFormat_Bgra );
/*
if( SUCCEEDED( hResult ) ){
cvtColor(colorBufferMat, colorMat, CV_BGR2RGB);
colorscaleImage.setFromPixels(colorMat.data, colorWidth, colorHeight);
}
*/
}
SafeRelease( pColorFrame );
// get body frame
IBodyFrame* pBodyFrame = nullptr;
hResult = pBodyReader->AcquireLatestFrame( &pBodyFrame );
if( SUCCEEDED( hResult ) ){
IBody* pBody[BODY_COUNT] = { 0 };
hResult = pBodyFrame->GetAndRefreshBodyData( BODY_COUNT, pBody );
if( SUCCEEDED( hResult ) ){
for( int count = 0; count < BODY_COUNT; count++ ){
BOOLEAN bTracked = false;
hResult = pBody[count]->get_IsTracked( &bTracked );
if( SUCCEEDED( hResult ) && bTracked ){
Joint joint[JointType::JointType_Count];
hResult = pBody[ count ]->GetJoints( JointType::JointType_Count, joint );
if( SUCCEEDED( hResult ) ){
// Left Hand State
HandState leftHandState = HandState::HandState_Unknown;
hResult = pBody[count]->get_HandLeftState( &leftHandState );
if( SUCCEEDED( hResult ) ){
ColorSpacePoint colorSpacePoint = { 0 };
hResult = pCoordinateMapper->MapCameraPointToColorSpace( joint[JointType::JointType_HandLeft].Position, &colorSpacePoint );
if( SUCCEEDED( hResult ) ){
int x = static_cast( colorSpacePoint.X );
int y = static_cast( colorSpacePoint.Y );
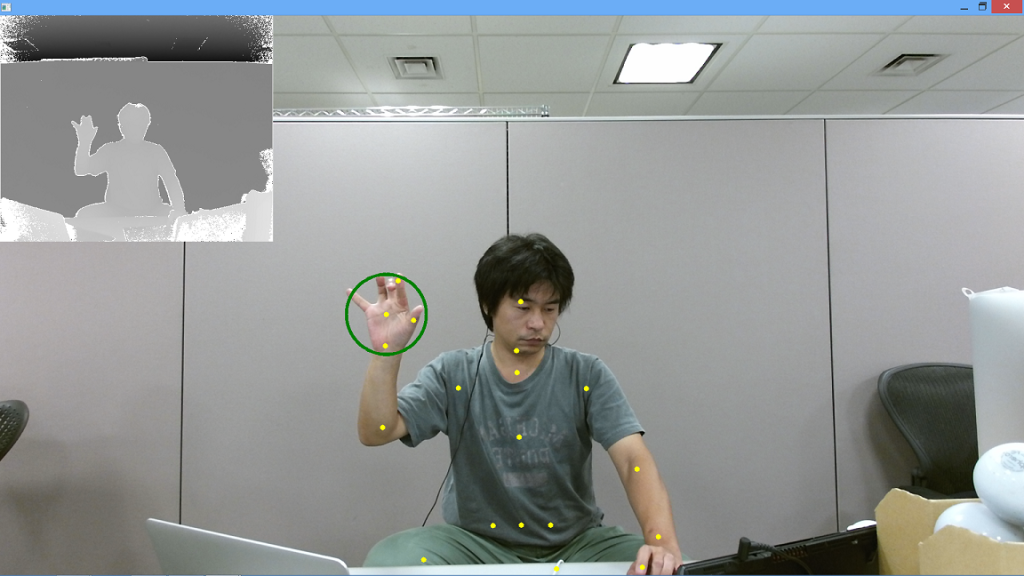
if( ( x >= 0 ) && ( x < colorWidth ) && ( y >= 0 ) && ( y < colorHeight ) ){ if( leftHandState == HandState::HandState_Open ){ cv::circle( colorBufferMat, cv::Point( x, y ), 75, cv::Scalar( 0, 128, 0 ), 5, CV_AA );
} else if( leftHandState == HandState::HandState_Closed ){
cv::circle( colorBufferMat, cv::Point( x, y ), 75, cv::Scalar( 0, 0, 128 ), 5, CV_AA );
} else if( leftHandState == HandState::HandState_Lasso ) {
cv::circle( colorBufferMat, cv::Point( x, y ), 75, cv::Scalar( 128, 128, 0 ), 5, CV_AA );
}
}
}
}
// Right Hand State
HandState rightHandState = HandState::HandState_Unknown;
hResult = pBody[count]->get_HandRightState( &rightHandState );
if( SUCCEEDED( hResult ) ){
ColorSpacePoint colorSpacePoint = { 0 };
hResult = pCoordinateMapper->MapCameraPointToColorSpace( joint[JointType::JointType_HandRight].Position, &colorSpacePoint );
if( SUCCEEDED( hResult ) ){
int x = static_cast( colorSpacePoint.X );
int y = static_cast( colorSpacePoint.Y );
if( ( x >= 0 ) && ( x < colorWidth ) && ( y >= 0 ) && ( y < colorHeight ) ){
if( rightHandState == HandState::HandState_Open ){
cv::circle( colorBufferMat, cv::Point( x, y ), 75, cv::Scalar( 0, 128, 0 ), 5, CV_AA );
}
else if( rightHandState == HandState::HandState_Closed ){
cv::circle( colorBufferMat, cv::Point( x, y ), 75, cv::Scalar( 0, 0, 128 ), 5, CV_AA );
}
else if( rightHandState == HandState::HandState_Lasso ){
cv::circle( colorBufferMat, cv::Point( x, y ), 75, cv::Scalar( 128, 128, 0 ), 5, CV_AA );
}
}
}
}
// Joint
for( int type = 0; type < JointType::JointType_Count; type++ ){
ColorSpacePoint colorSpacePoint = { 0 };
pCoordinateMapper->MapCameraPointToColorSpace( joint[type].Position, &colorSpacePoint );
int x = static_cast( colorSpacePoint.X );
int y = static_cast( colorSpacePoint.Y );
if( ( x >= 0 ) && ( x < colorWidth ) && ( y >= 0 ) && ( y < colorHeight ) ){
cv::circle( colorBufferMat, cv::Point( x, y ), 5, static_cast< cv::Scalar >( color[count] ), -1, CV_AA );
}
}
}
}
}
cvtColor(colorBufferMat, colorMat, CV_BGR2RGB);
colorscaleImage.setFromPixels(colorMat.data, colorWidth, colorHeight);
}
}
SafeRelease( pBodyFrame );
}
//--------------------------------------------------------------
void ofApp::draw(){
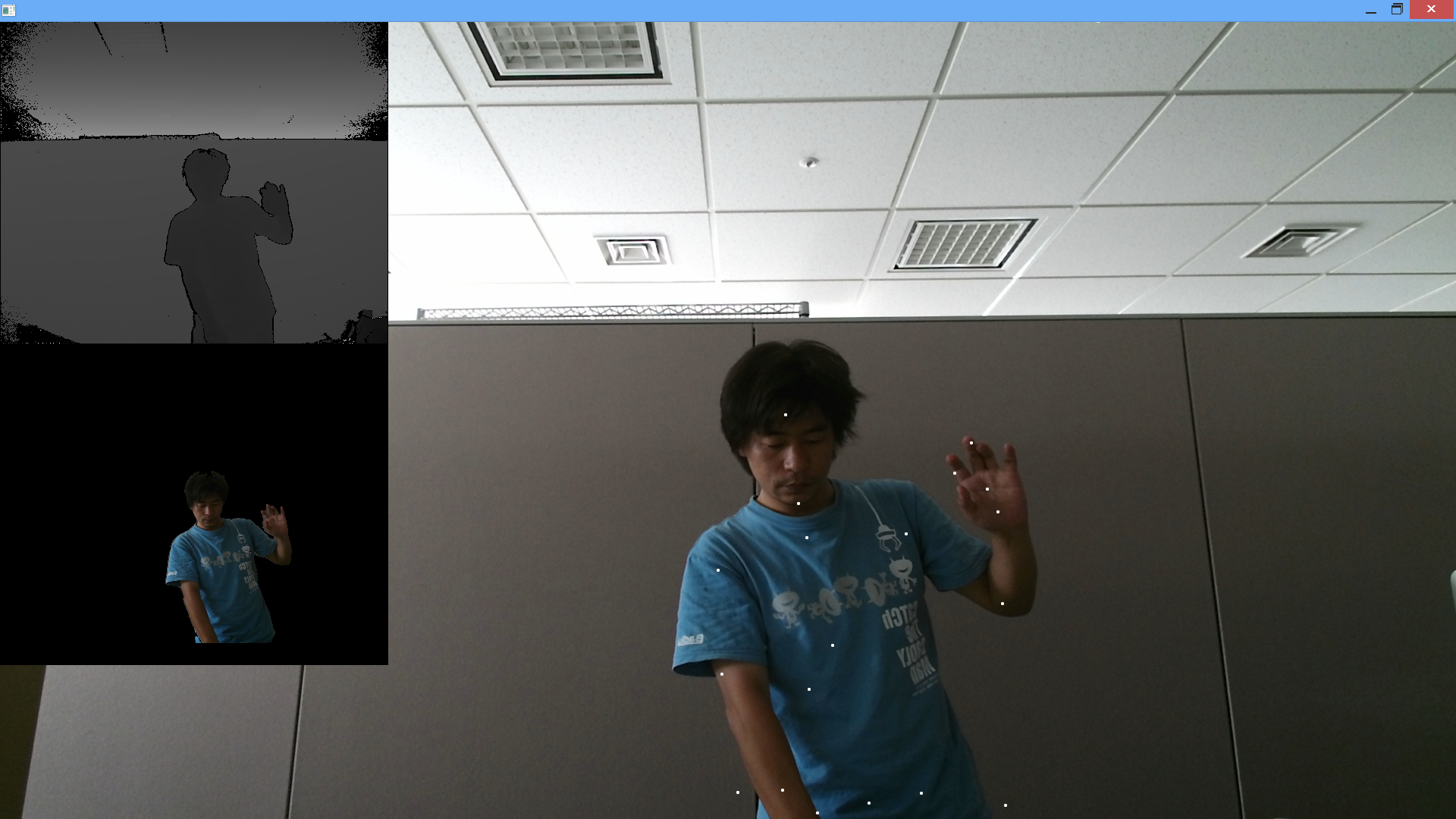
colorscaleImage.draw(0, 0);
grayscaleImage.draw(0, 0);
}
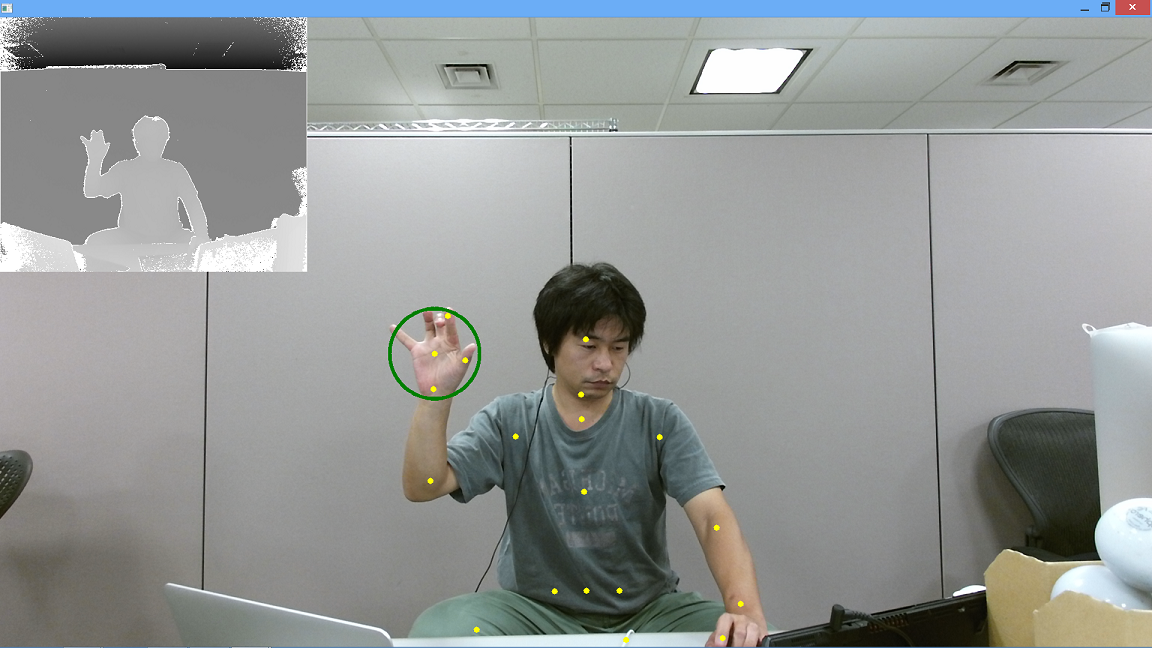
5. 実行